Evaluation of ADU800 and "DualRef" Heading Accuracy
ADU800 (Trimble)
Dual Reference unit (Advanced Navigation)
- Caveat: Missing from this draft are:
- discussion of the of attitude unit specifications
- claims by the maufacturer
- how it measures heading
- what it provides
comparison of raw NMEA data inputs (data not available yet)
(1) Abstract:
Ashtech units have been used on UNOLS (and other) ships for many years. R/V Pelican had no accurate heading device and bought an ADU800.
R/V Endeavor has two Ashtech units, ADU2 and ADU5. The ADU5 has never worked as well as the older, ailing ADU2. Endeavor techs were highly motivated to replace the ADU5 with a good alternative that did not rely on the Ashtech product line. The DualRef was installed for a month of testing (and remained on the ship for one more cruise).
Various iterations have resulted in 3 Pelican cruises and 2 Endeavor cruises over the Continental shelf, with the WH300 collecting data while running Bottom Track mode. This provides a ground-truth comparison of the ship's geo-referenced angle over the earth (from bottom track) and the heading of the attitude device.
ASHTECH
- cost for a modern unit (ADU800) is about $10-$15K
- internal data flagging: a "reacquisition flag" is used in various NMEA messages to denote an invalid message
- data dropouts: varies by installation: individual pings to intermittant to drop-dead (requires a full reset)
- self-evaluation of bad points: Ashtech fails to flag some points which are obviously bad, but they tend to be wildly wrong and isolated, hence easy to elininate during automated processing
- some Ashtech installations are close to 100% good all the time.
- some Ashtech installations are 65%-85% good, possibly degraded accuracy
- some Ashtech installations require frequent resets (creating a monitoring burden)
DUAL REF
- cost: $10K-15K
- long-term reliability in marine environment is unknown.
- self-evaluation of bad points: DualRef fails to flag some periods of data when (by comparison with other headind devices) the points are bad. These can be short (10-15sec) or longer (30min) and may or may not be obviously bad. Some periods will be caught in automated processing, but other periods (especially longer drifts) will require manual editing in post-processing.
- data (bad flag): available in binary data stream only, but provide C routines to access the binary stream. Endeavor is providing a fake $PASHR message using their "bad" flag as one field; UHDAS is using that to flag the bad values. This scheme works in part, because of the nature of the DualRef errors: the heading drifts of for a period of time, so subsampling the 400Hz binary data stream is a reasonable representation of the heading and its error flag for some period of time.
- negative: quality flag not available in NMEA messages; Abusive use of $PASHR Proprietary Ashtech message.
(2) Evaluation
ADCP data are noisy, hence processing requires averaging. Chunks of of data are averaged to create "ensembles" which include water velocities and (if enabled) bottom track velocities. For the WH300, we use 120sec (2 minutes) averages. The "bottom track phase calibration" is the estimate of the average difference (over one ensemble averaging period) between the angle of the ship as determined by bottom track, and the angle of the ship given by a particular heading device.
- Data for the evaluation consist of (at present)
ADCP in bottom track mode
- Examples (for comparison) from
- ADU2 (Oceanus) -- 18 cruises
- gyro (Walton Smith) -- 9 cruises
- Endeavor -- 2 cruises:
- ADU2
- gyro
- dualref
- Pelican -- 3 cruises
- ADU800
- furuno
The evaluation below has three components:
- Comparison of different heading devices
- More detailed plot of bottomtrack angles for each cruise
- More detailed look at DualRef in comparison with gyro and ADU2
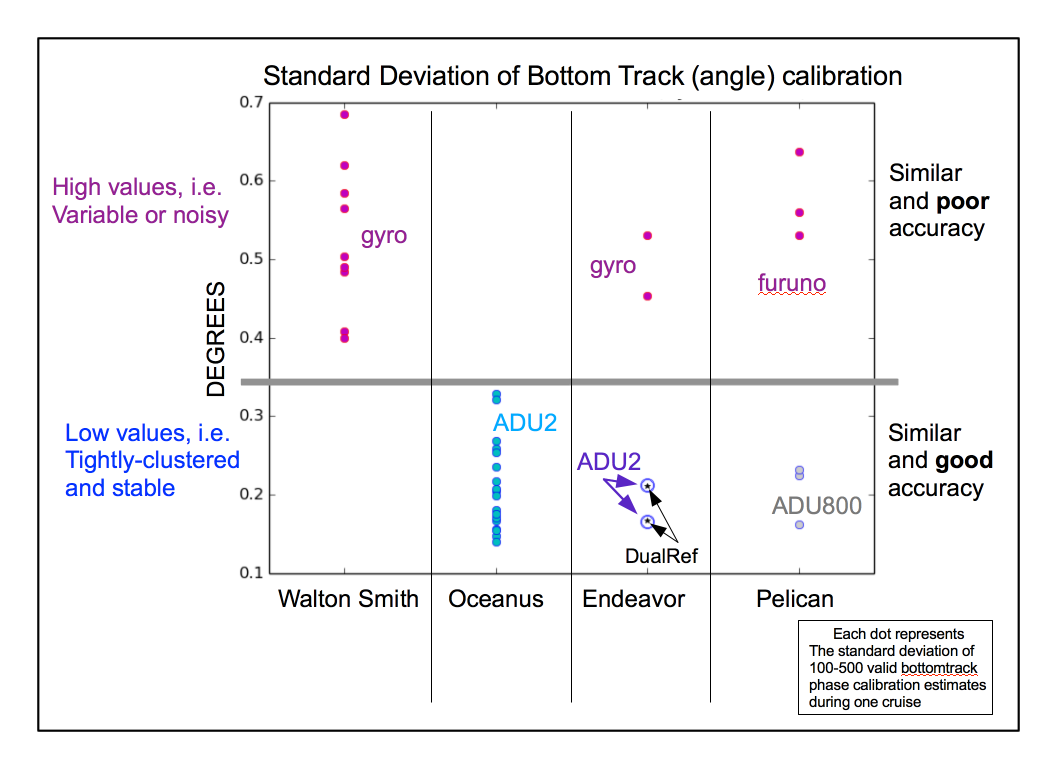
(1) Comparison of different heading devices
This consists of one plot, one dot per cruise, of the standard deviation of that cruise's all the bottomtrack calibration estimates. The data in each cruise have already been fixed to make the average of the bottom track calibration estimates be zero. This plot shows the variability of the bottom track estimates.
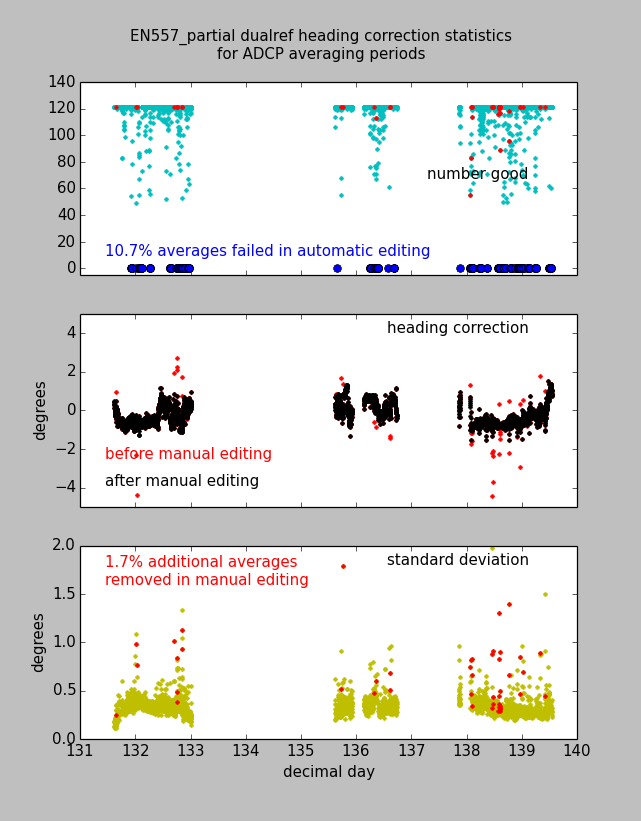
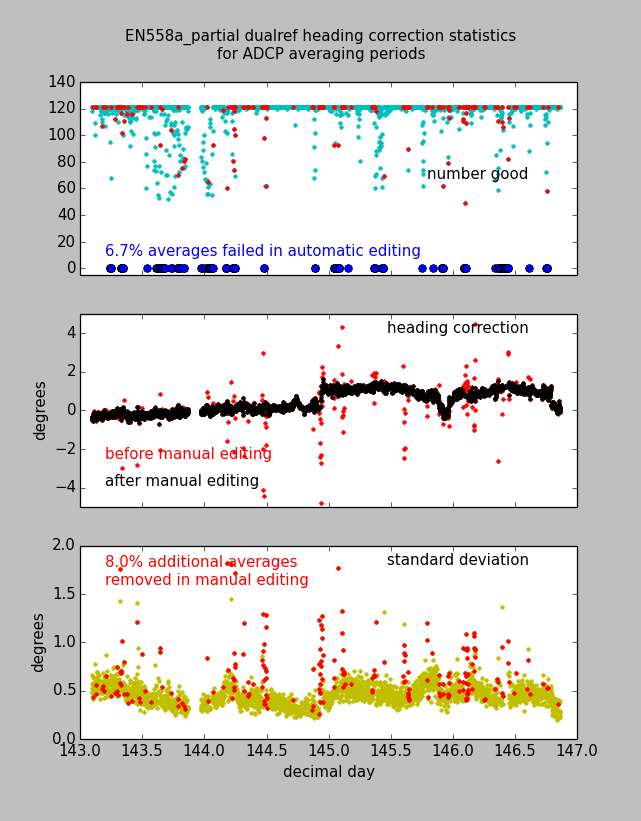
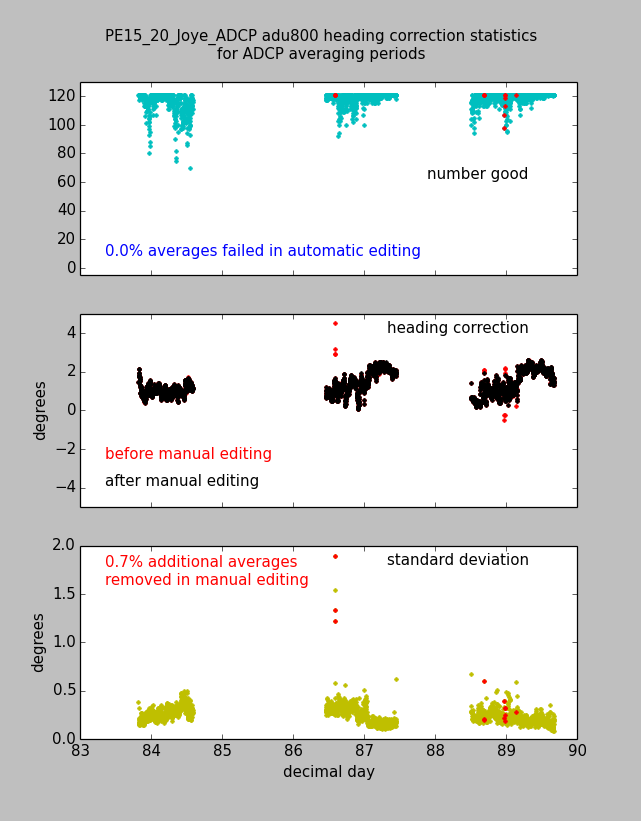
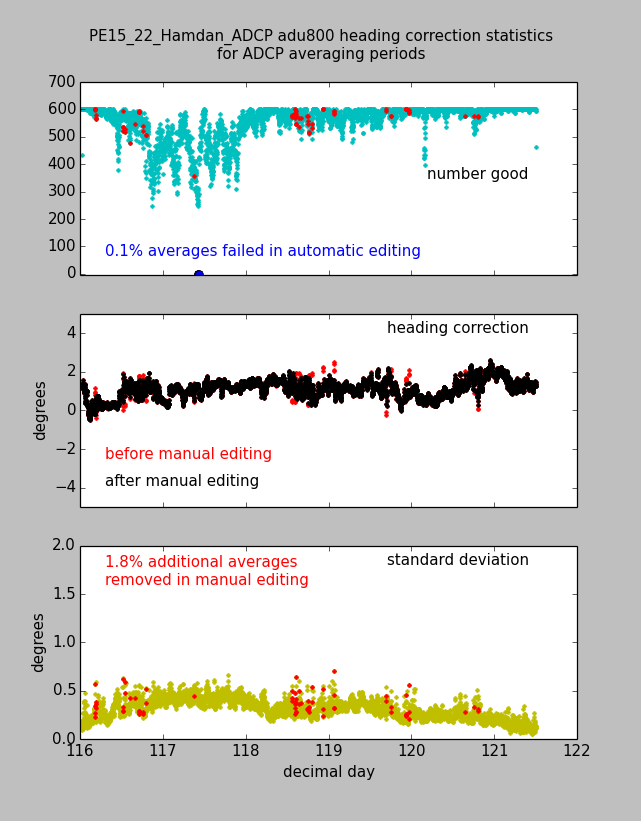
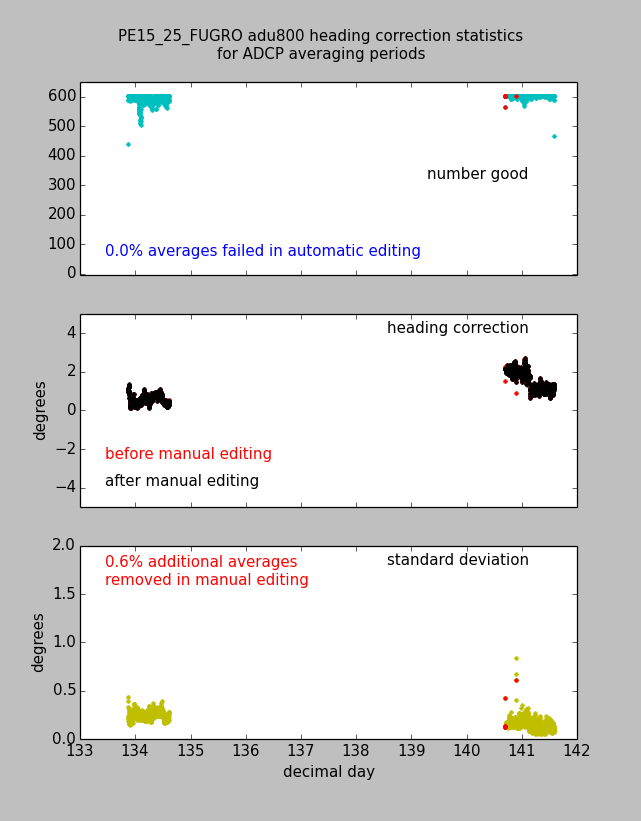
(2) More detailed plot of bottomtrack angles for each cruise
This set consists of one plot per cruise, showing the heading correction to the gyro (difference between the gyro and the accurate heading device -- ADU2, ADU800, DualRef) for each of the 2-minute ensembles. Each estimate of heading correction has already been edited based on the instrument's on QC flag, unreasonable values (+/- 20deg difference), outliers (2standard deviations) or after all that, insufficient number of points remaining. All heading corrections were also edited after the cruise was over, looking for outliers in the timeseries of ensemble heading corrections. Statistics of this heading correction are shown:
- accurate (ADU2, ADU800, Dualref) heading compared to reliable heading (gyro or furuno)
- from the processed data (automated at-sea)
- after post-processing (to remove outliers)
number of points in the 2-minute average correction (after at-sea editing using QC flags and removing outliers)
standard deviation of points in the 2-minute average correction
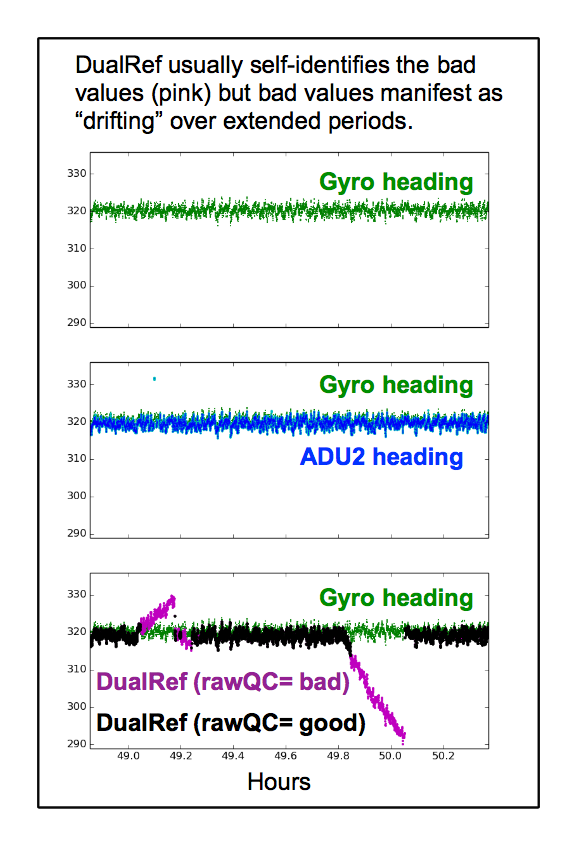
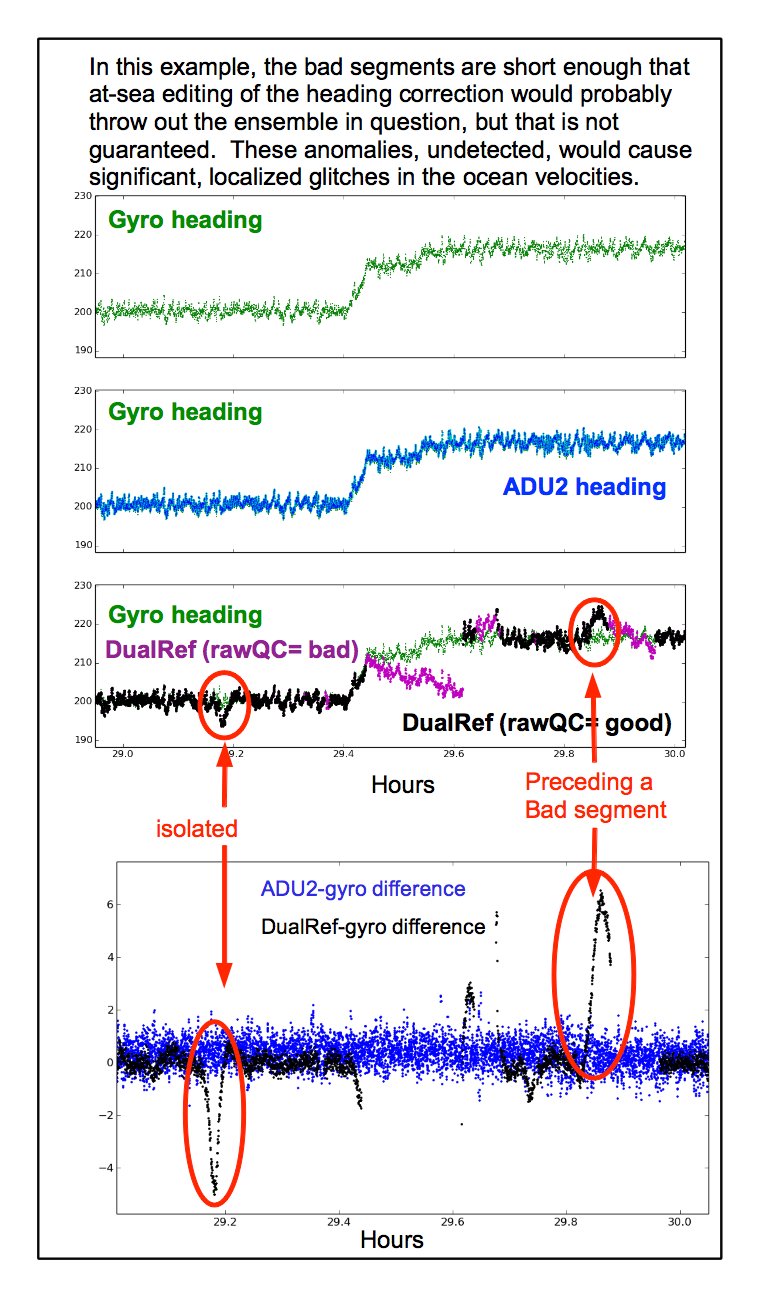
(3) More detailed look at DualRef in comparison with gyro and ADU2
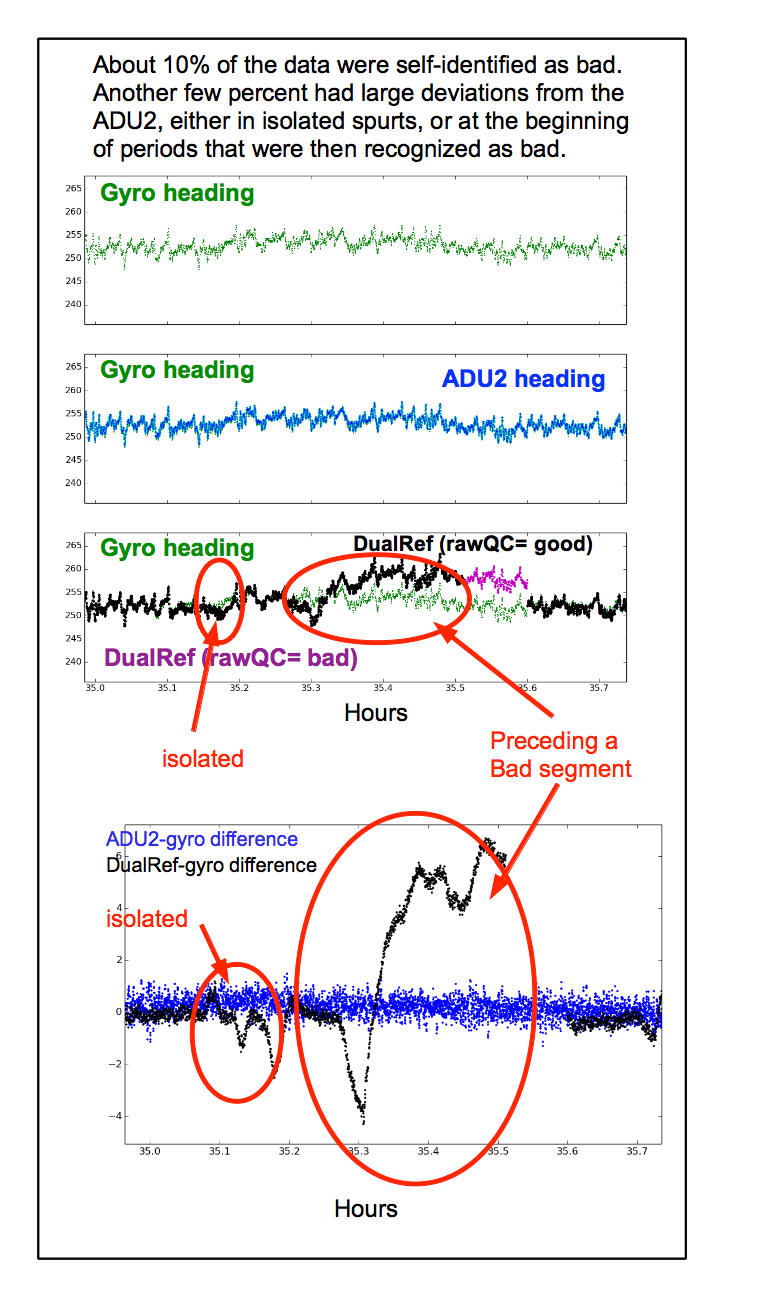
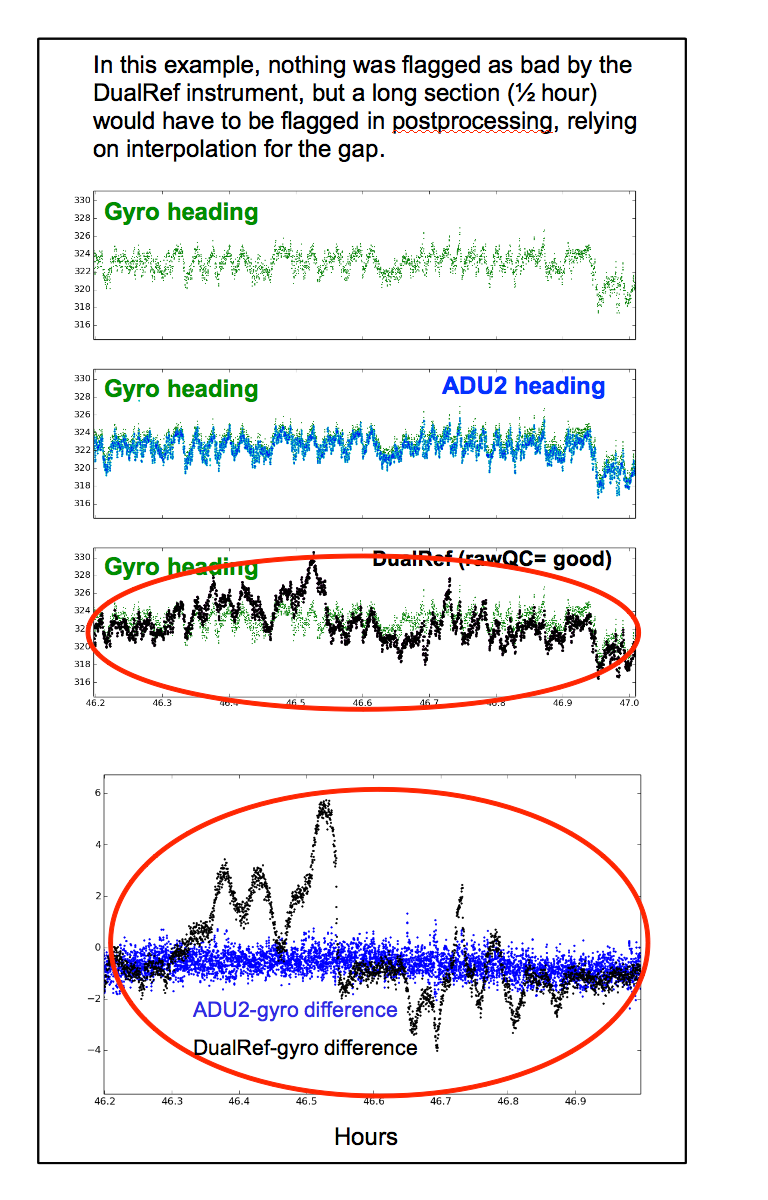
These figures all have one plot in common: a period of time with headings in three panels from (top) gyro, (middle) gyro and ADU2, (bottom) gyro and DualRef. In the case of ADU2 or DualRef, the data are plotted in red or magenta where the instrument flagged the data as bad, and blue or black where the instrument did not flag the data as bad. In most of the figures, an additional plot is present, showing the heading difference between gyro-ADU2 and gyro-DualRef.
The ADU2 was doing well, so very few points are flagged. The DualRef shows periods of unflagged heading drift up to several degrees. The target accuracy for ADCP data is 0.1deg, so some deviations of a few tenths would be expected. The DualRef has unflagged shorter and longer periods of heading error, some with quick and large excursions, some longer with more variable deviations. These are seriously problematic. The DualrRef errors are similar to a POSMV in poor health, with 10% of the headings flagged as bad, but more not flagged and yet containing serious problems.
Summary:
ADU2, ADU800 and DualRef all have apparently reasonably good accuracy when they work well
This evaluation only has 2-3 cruises per instrument:
- need more like 10-15 for a good statistical evaluation
- need more installations to compare behavior on different ships
ADU800 and DualRef have a similar price
ADU800 is better on the whole:
positive:
- accuracy of good values (after automated editing) is similar to ADU2
- self-evaluation of bad points works better (fewer points were still bad)
- remaining (bad, but unflagged) points are few, and easily removed with automated threshold editing
- long history of deployments in a marine environment
negative:
- unhappy customers regarding company support
DualRef is better than nothing, but problematic:
positive:
- accuracy (of good values, after manual editing) is similar to ADU2
- sales/technical staff helpful and highly motivated
- provide C-libraries for accessing the binary data stream
negative:
self-evaluation of bad points is incomplete
remaining anomalies require manual cleanup (could be time-consuming)
quality flags are not included in NMEA-style serial messages
- not built for this application:
- binary data is 400Hz
- not familar with marine environment (eg. corrosive)
Recommendation
ADU800 seems like a better bet. DualRef might not withstand the rigors of sea deployments and the data are not as clean. It may take significant additional work to get the most out of DualRef. Based on these cruises, we cannot recommend a DualRef for use with an ADCP, when the ADU800 has a similar price and better characteristics for this use.
Jules Hummon Draft: 2015/05/31 Released: 2015/06/09 Updated 2015/06/11