2015: POSMV headings on Bell Shimada
Introduction
Calculation of ocean currents from raw shipboard ADCP data requires ship speed and heading. The heading is used to orient the transducer (relative to north) for the calculations. An error in heading is multiplied by ship speed and results in an error in the calculated ocean currents, showing up primarily in the cross-track direction, i.e. a false current to port or starboard. The magnitude of the error is proportional to ship speed and is roughly 10cm/s for every degree of heading error. Since open ocean speeds are rarely in excess of 20cm/s, this represents a large error. Therefore we want the heading errors to be on the order of 0.1deg, so the calculated ocean speeds are not off by more than 1cm/s (on the order of other errors in the system).
Accurate heading devices are expensive and often difficult to maintain. The POSMV is no exception. When it works well, it is a highly accurate heading device. When it does not work well, it is usually still better than nothing, but the resulting ADCP data are compromised.
POSMV Quality on Bell Shimada
UHDAS was installed in the Bell Shimada in March, 2015, for shipboard ADCP acquisition and processing, and monitoring. Prior to that we have no experience with the Bell Shimada ADCP or its POSMV. During the 2015 field season, the ADCP was run for some fraction of the time during the SAKE cruises, and is presently being run (apparently continuously) during SH1508_leg2. This gives us the first chance to look at the POSMV for whole, rather than punctuated days of logging.
The UHDAS email sends back an evaluation of the POSMV quality and it has never hit 100%, and rarely exceeded 50%. It seems that it is now doing quite poorly.
A field exists in the $PASHR message called "heading accuracy" (which should be thought of as "HEADING ACCURACY ERROR"), which is supposed to indicate the POSMV's own analysis of the accuracy of the heading. A low value means low error, a higher value means higher error. UHDAS uses a very strict criterion for judging whether the headings must be discarded, by throwing out any headings where the Heading Accuracy Error is greater than a (very low) threshold.
Previous reports and figures have illustrated the following points regarding the evaluation of a POSMV's heading accuracy:
- If a POSMV is working (all GAMS==2 all the time) then the value is flatlined at it's minimum, tyically 0.018 (set by the distance between antennas?)
- A GAMS solution of 2 will give low (good) values of the Heading Accuracy Error. A mix of GAMS=1 and GAMS=2 may or may not have solid low values or may have excursions
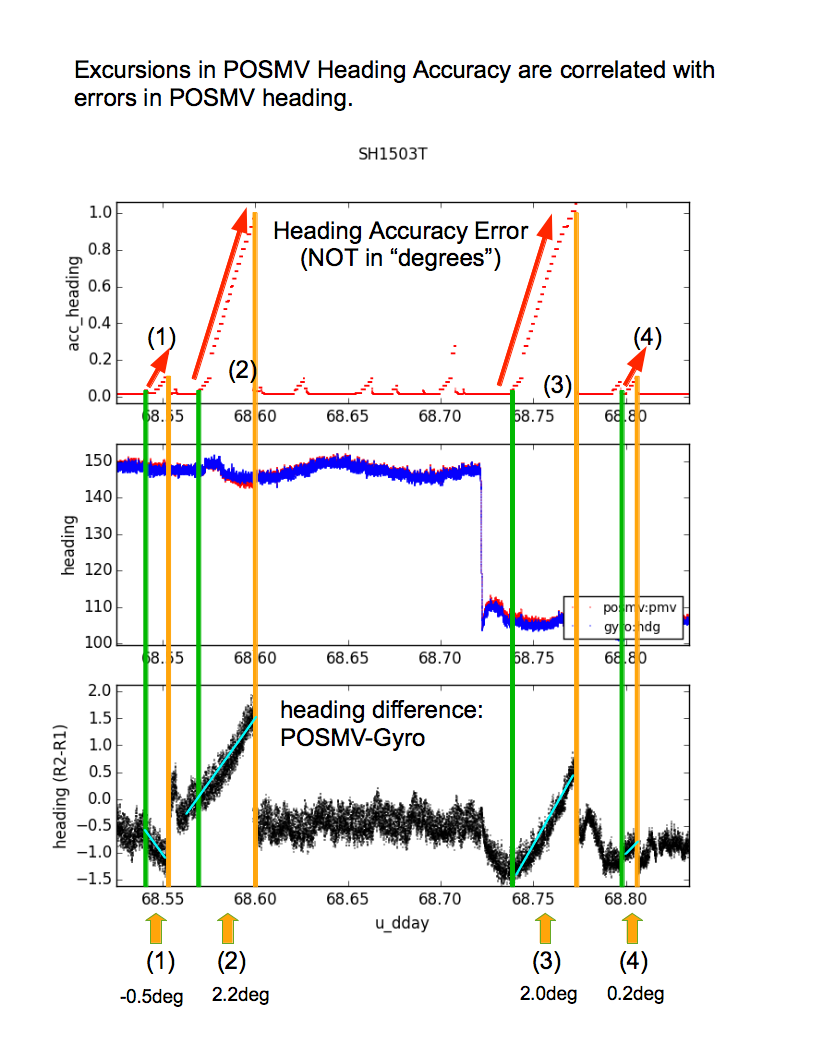
- If there are excursions of this Heading Accuracy Error value, then they are usually correlated with errors in heading.
- The Heading Accuracy Error is NOT in degrees.
- The error in heading is NOT proportional to the Heading Accuracy Error value.
- If the lowest value of the Heading Accuracy Error is not at its minimum, but is "floating" at a few units, there is no telling what the actual errors are.
Example of Characteristic POSMV Errors (March 2015)
The following is an example of these "excursions", where the POSMV is compared to the ship's gyro. Although the ship's gyro also has errors, these deviations in heading are quite large in comparison, and very obviously associated with the period of time when the Heading Accuracy Error is above the baseline. A properly functioning POSMV will have heading errors around 0.1deg, but these are clearly more like 1-2deg.
Oct 2015 status
The figure below is a screenshot of four kinds of information provided by the UHDAS daily email:
- top left: a plot of the POSMV Heading Accuracy Error of the previous day
- bottom left: a statistical summary of the POSMV quality for the previousday
- top right: bird's-eye view of ocean velocity, representing where the ocean currents flow in a near-surface layer (in this case, 40-80m). Ocean depth is included for context; arrow colors represent transducer temperature (crude but qualitatively informative)
- bottom right: vertical color contours of east/west and north/south components of the ocean currents.
In these plots of ocean currents, the highest values are about +/- 0.4m/s, but over half of the currents are under 0.2 m/s. A 1-deg error in POSMV heading will result in a 0.1m/s error in ocean velocity, a significant fraction of the typical values shown in the figure.

Conclusion
It is imperative that there be a heading device with sufficient accuracy to give high-quality shipboard ADCP data. The Bell Shimada is used by a variety of scientific programs that depend on this.
- Options include:
- fix the POSMV
- buy another device that will do the job.
One such possibility is the Ashtech ADU800. It has been vetted on two ships with UHDAS and shipboard ADCPs. It runs about $15K, which is probably cheaper than repairing either of the other two devices.