Monitoring at sea Calibration
ADCP processing:
health of the components:
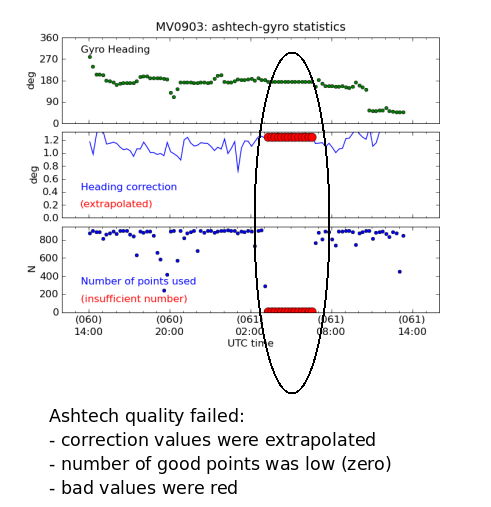
heading correction
If the ship has an accurate heading device as well as a gyro, UHDAS will keep track of the difference between the two, and plot it. See this link for an annotated example of the figure. See this link for more detail about Ashtech errors and how to recognize them. An accurate heading device might be Ashtech, POSMV, Seapath, Phins, Mahrs, or Octans. At sea, these are on the Quick Links: Figures link on the UHDAS home page, usually here.
Note
Not all of these instruments have QC indicators
data acquisition:
On the UHDAS computer console, “green is good” for the logging status.
If a cable falls out or a feed quits coming in, the bar turns red (“red is rubbish”)
The orientation of each transducer with respect to the bow must be determined for processing to proceed. This is done at the time of a UHDAS installation using either previous data or a bottom track calibration run if there is no earlier data from the instrument. A new instrument is calibrated using a bottom track run.
Over time, watertrack and bottomtrack calibrations are used to determine whether this angle has changed. If a heading correction device exists and is working, it is not necessary to leave bottom tracking on, and in fact you lose statistical robustness (increase noise) in the ocean velocity data when bottom track is on, because every other ping is looking for the bottom. Bottom track is detrimental to the velocity data if it is left on when the ocean floor is out of range. In general, turn off bottom track when the ocean floor is out of range of ADCPs
Every day an email is generated and sent to the ADCP operator at sea and intersted parties on land. That email includes information about the compter’s health, processing status, and a data snippet that is plotted. On land, the web site with this information is accessible here.
Watertrack and bottom track calibration values are included in this email. The hope is that values will be:
- close to 1.0 for amplitude
- close to 0.0 for phase
See this annotated example for more details.
Please note these caveats:
- Some cruises have no bottom track data, some have no watertrack data, simply due to the cruise track.
- Watertrack calibrations are by nature noisy and generally accumulate slowly.
- These data are preliminary; there could be editing that has not yet been done that will clean up these values, for instance some data may not have been flagged as bad below the bottom, and if any underway bias exists (eg. from bubbles) it will hurt the amplitude calibration.
- There could be gaps in the heading correction device that are throwing off the phase calculation
At Sea the most recent watertrack and bottom track calibration assessments are available on the UHDAS home page, as well as a statement about the angles that were determined when UHDAS was installed.
ADCP calibration resources include detailed discussions of calibration in
and these notes on
{kind=link}
{kind=link}
{kind=link}