A new bottom-detection algorithm is used in gautoedit. It has three parameters:
The first is the size of the amplitude bump. It is essentially the same as the amplitude bump used in the waterfall editing to flag a possible bottom signal. The default (25) is good for bottom detection in deeper bins. You may need to make it smaller (eg 15) to detect the bottom in shallower bins
The second parameter indicates how much smoothing is done (in the vertical) prior to looking for the bump. The default (2) is good for deeper bins: if you are trying to detect the bottom in shallower water, you may need to do less smoothing (eg 1)
The third parameter indicates how large a window to use to detect the amplitude bump. The default value (5) is good for deeper bins: you may need to look closer (eg 2) if you’re working near the surface.
Summary: the defaults values are good for deeper bins. Because of the geometry, you might try scaling all three values together like this (as a reasonable starting point):
| bin number | AMP THRESHOLD | smoothing | window |
| 1-2 | 10 | 0 | 2 |
| 5-15 | 15 | 1 | 3 |
| 20-40 | 25 | 2 | 5 |
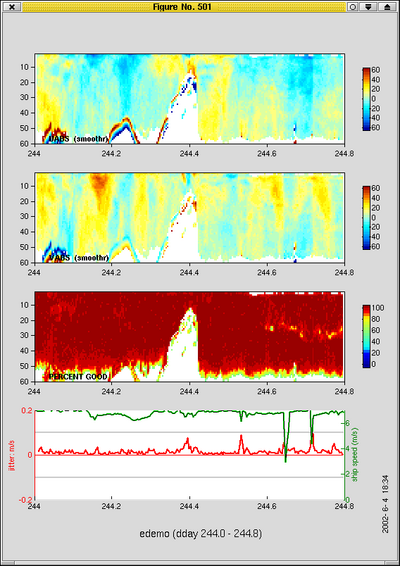
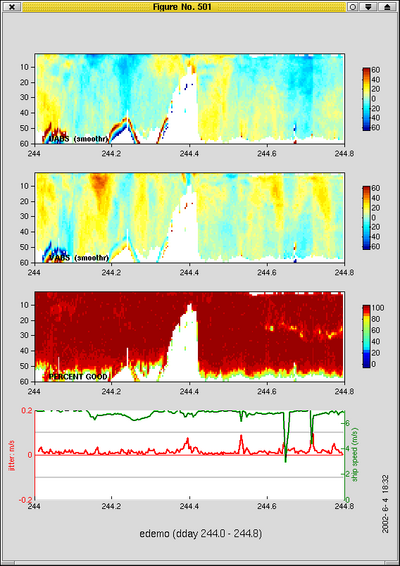
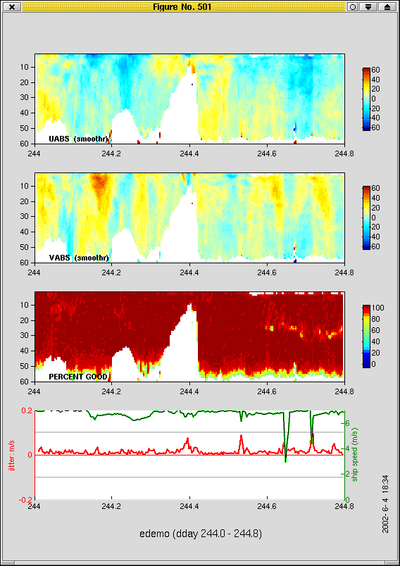
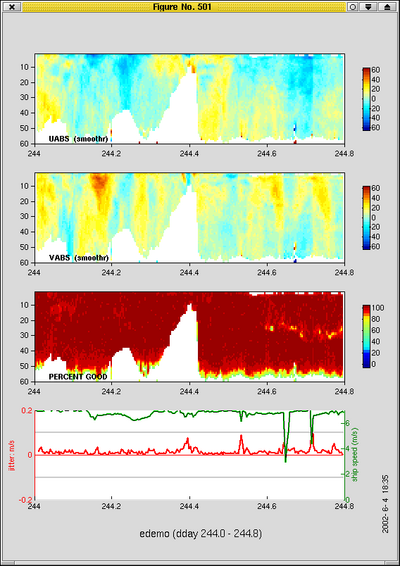
The effect on UABS (ocean u) is shown below with different parameters:
The full panel plots are available below with different sets of parameters:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}