Ocean Velocity from ADCPs¶
Accurate determination of ocean currents from an ADCP requires additional inputs: GPS is used for ship position and speed, and heading is used to orient the measured velocities to geographic North. This ocean velocity calculation is very sensititive to the heading measurement: errors in heading cause cross-track errors in velocity that scale with ship speed, shipspeed*sin(angle_error). At typical cruising speeds, a 1-degree error causes a 0.1m/s cross-track error in calculated ocean velocity. In much of the open ocean, errors if this magnitude can be a significant fraction of the actual ocean velocities.
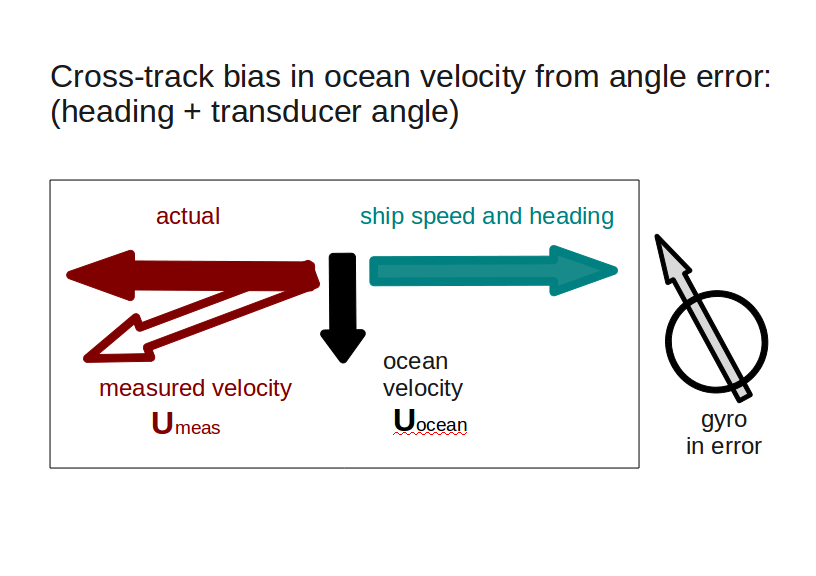
A cartoon shows the concept:
In this example, the ocean is not moving, so the calculated ocean velocity should be zero. Suppose the ship is steaming east, but the heading used had a small error (indicated by the incorrect North in the Gyro). Adding the ship velocity to the (incorrectly calculated) measured velocity leaves a cross-track residual (black).
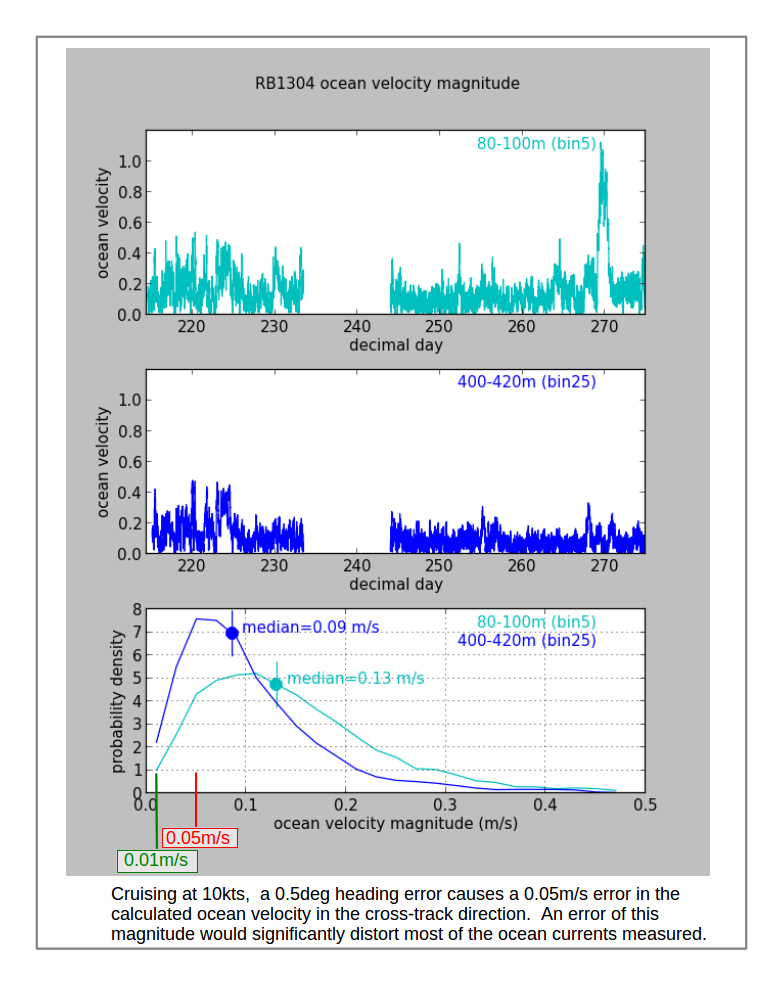
The next figure shows the ADCP-derived ocean speeds near the surface and at depth for the RB1304 cruise (top two panels). The third panel is a histogram of velocities at two depths. Half the near-surface ocean current speeds are smaller than 0.13m/s and half the 400-m ocean current speeds are less than 0.09m/s.
What is the smallest reasonable error to expect for ocean velocities calculated from ADCP data? What error levels are reasonable to tolerate?
An error of 0.05m/s would be too large, since that accounts for up to 1/2 of the ocean signal for much of the cruise. A better error level would be 0.01m/s. Using a typical steaming speed of 10kts, this translates into a required heading accuracy of 0.1deg to keep the cross-track biases below 0.01m/s.