Heading Devices on R.H.Brown¶
The NOAA ship Ronald H. Brown provides three heading sources for shipboard ADCP data processing:
- Meridian Standard Gyrocompass
- TSS Mahrs
- POSMV 320 v.4
GYRO Overview¶
The ship’s gyro (Meridian Standard) is a mechanical gyrocompass. A properly-maintained and latitude-compensated gyrocompass should have errors of +/- 1degree in low-to-mid latitudes, with higher errors in very high latitudes. Errors, particularly those associated with errors in compensation parameters, are dependent on speed, heading, and latitude. Ship accelerations can excite “Shuler Oscillations” (84min period). The gyro puts out an NMEA heading string with no quality indicator. These gyros are historically reliable but not very accurate for the shippoard ADCP application.
MAHRS Overview¶
The TSS Mahrs uses a “dynamically tuned gyro” and “dynamic motion sensor” to determine heading, pitch, roll, and heave. The Mahrs uses a GPS to compensate for latitude. Manufacturer estimates of heading error are:
- “settle point” accuracy 0.1deg secant latitude
- “dynamic accuracy” 0.2deg secant latitude
The TSS Mahrs is slightly less reliable than the Gyro (has rare failures) and should have far better accuracy than the gyro.
POSMV Overview¶
The POSMV uses two GPS antennas, an Inertial Motion Unit (IMU) and a Kalman filter to calculate attitude. Correct installation of a POSMV requires that both GPS units and the IMU be accurately surveyed in on the ship. Manufacturer estimate of heading accuracy is:
- 0.02deg (independent of latitude) with GAMS (GPS Azimuth Measurement Subsystem) solutions. This level of accuracy depends on the distance between the two GPS antennas and may not reflect the actual accuracy for a given installation.
POSMVs, when healthy, should have the best heading accuracy of these three devices. GAMS solutions must be reliable or accuracy will suffer.
The next figure shows the difference between the Gyro-Mahrs and POSMV-Mahrs over the whole cruise. These are 5-minute averages differences, after the POSMV had been QC’d (details in a later section)
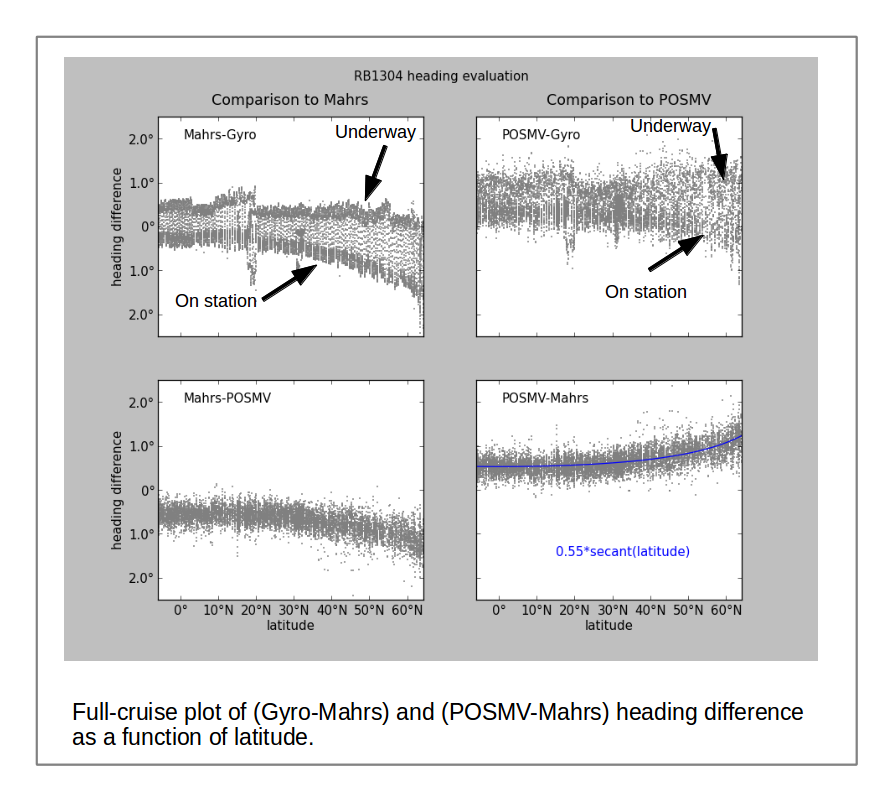
Over the course of the cruise, several patterns emerge:
- The Gyro has large differences between on-station and underway periods (more obvious when compared to Mahrs). This pattern is typical when a gyro’s speed-compensation is left in the “underway” setting.
- The Gyro difference between on-station and underway periods decreases towards the equator (larger at high latitude)
- Mahrs-Gyro and Mahrs-POSMV differences are latitude-dependent, indicating that the Mahrs is the device with the strong latitude-related error. The manufacturer claims the Mahrs heading error should scale with 0.2*secant(latitude). This expression should create an envelope around the heading errors, and is not likely to create a highly-correlated error that is a function of heading. This suggests the Mahrs has some kind of error in calibration, settings, or ancillary data feed.
The POSMV heading data were edited using the “heading accuracy” parameter present in the $PASHR messages recorded by UHDAS. The combination of the QC editing of raw headings and the averaging used to created these data points masks the details of POSMV data quality.
The POSMV-Mahrs latitude-dependent difference (bottom panels) is only clearly visible in this cruise, because it went all the way to 65N. Previous cruises after the POSMV was installed (2011, 2012) never exceeded 30degress (north or south), so the high-latitude difference was not obvious.