UH Currents Group
The UH Currents Group within SOEST (School of Ocean and Earth Science and Technology) at the University of Hawaii specializes in ocean current measurements, primarily using shipboard ADCPs (Acoustic Doppler Current Profilers). We
develop Open Source Software centered on UHDAS;
use it to acquire, process, and serve datasets;
provide services to the international oceanographic community;
and conduct research.
Firing et al. (2012) give a brief description of shipboard ADCP systems and UHDAS.
Ocean Currents
Ocean currents are a complex and ever-changing. In most of the world's oceans the long-term mean current is weak compared to the fluctuations, which arise from a combination of eddies and waves of many types. For example, satellite-tracked near-surface drifters near Hawaii can be seen going in all directions, often with looping trajectories characteristic of strong mesoscale eddies.
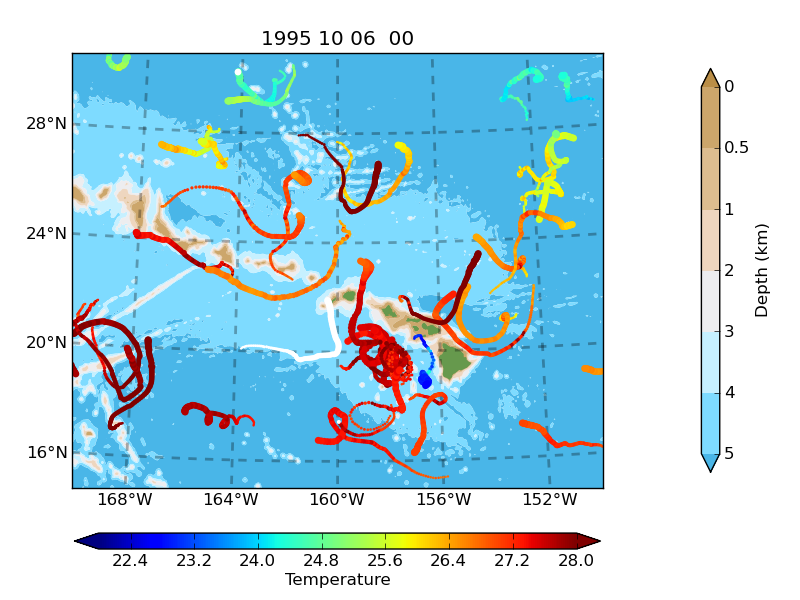
Ocean surface drifter tracks.
Each track spans one month, ending on October 6, 1995, with the thick end (the head) being the end point. Temperature measured by the drifter is color-coded. The tracks are white when the temperature sensor is missing. To get a better picture of the drifter data set, see the animation. Be patient: the drifters have been launched very irregularly, so there are periods when few or none are in the area shown here.
There are many ways of measuring ocean currents in addition to the drifter method illustrated above. Profilers measure the structure of currents as they vary with depth; the most common type of current profiler is the ADCP, also known as Doppler sonar. ADCPs can be deployed on the sea floor, on moorings, and from ships, either lowered with other instruments on a hydrographic wire (Lowered ADCP) or permanently mounted on the ship's hull (Shipboard ADCP). Most of our work is with this last deployment method.
Shipboard ADCPs can measure ocean current profiles from just below the ship to as much as 1600 m deep for the lowest-frequency instruments, the Teledyne-RDI Ocean Surveyor (OS38) operating at 38 kHz. The more common 75 kHz instrument (OS75) has higher vertical resolution but roughly half the range of the OS38.
As an example of ocean current measurements from a shipboard ADCP, here is a view of the upper-ocean current in the northwest Atlantic during a transit by the University of Rhode Island's R/V Endeavor in fall, 2011:
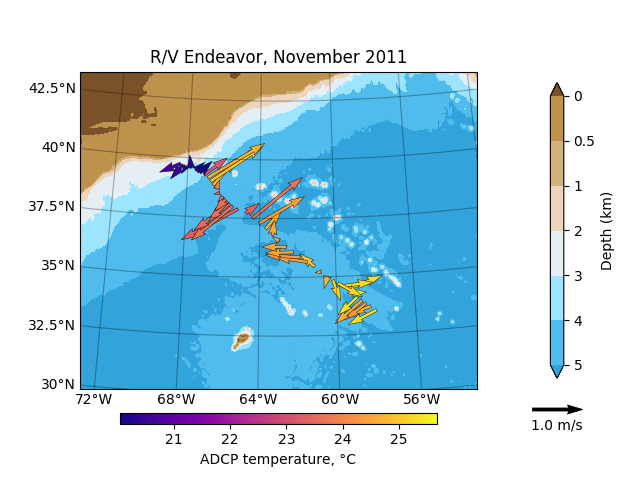
Currents in the top 100 m: crossing the meandering Gulf Stream
To orient yourself, note that Long Island and Cape Cod are in the northwest corner of the map. The cruise track is generally from southeast to northwest; the ship was returning to its port in Narragansett, RI. Approaching the coast it crosses a Gulf Stream meander, with strong current heading northeast, then southwest, and then northeast again. In this style of plot the tail of each arrow is the location of the velocity measurement, a point along the cruise track.
How do these currents vary with depth? To see that, we contour the velocity as a function of depth on the vertical axis and, for this example, longitude on the horizontal axis:
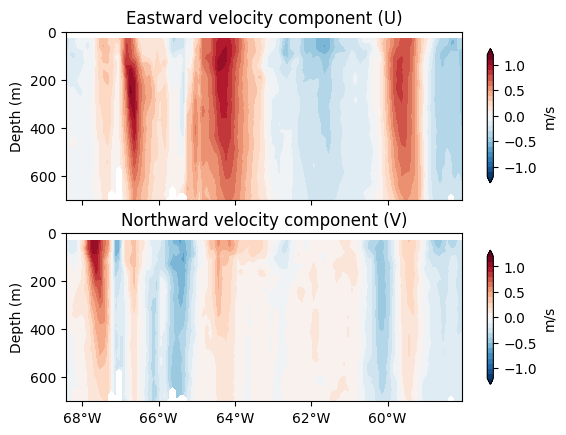
Contours of east and north velocity components
We use filled color contours spanning the range from -1.2 to 1.2 m/s at intervals of 0.1 m/s to show the structure of the velocity field on this section across the meandering Gulf Stream and eddies.
To be continued... This site is under construction.