3.6.6. Configuration files¶
proc_cfg.py
contains info for processing: serial feeds used, transducer alignment
DO NOT adjust anything in this file.
uhdas_cfg.py
contains info for email, web plots, bridge plots
DO NOT adjust anything in this file.
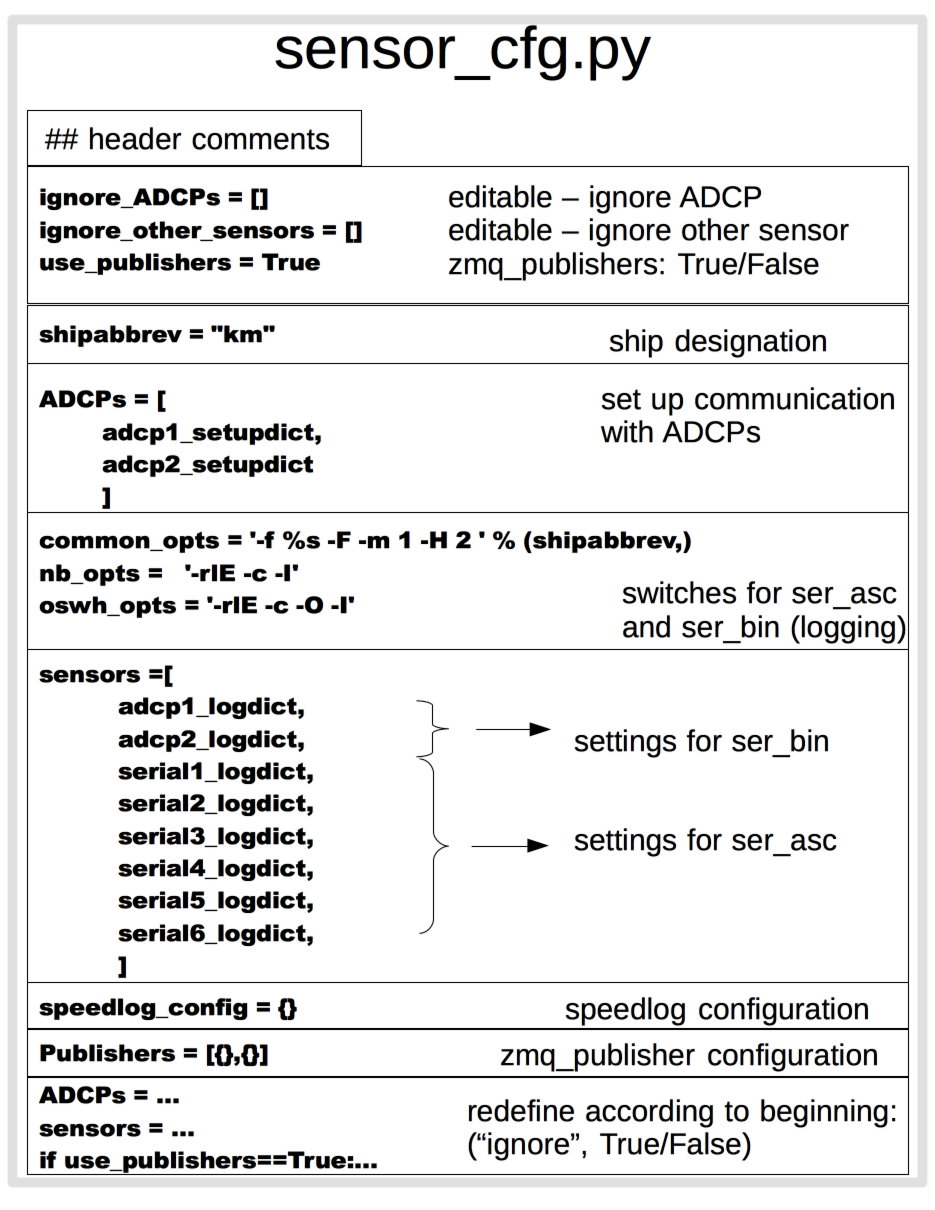
sensor_cfg.py:
serial logging: (baud rates, ports, messages to be logged)
lists all ADCP instruments as a group
lists all serial inputs (with ADCPs as a subset)
3.6.6.1. sensor_cfg.py layout¶
3.6.6.1.1. File Layout¶
- Sections exist to
turn off sensors
set up 2-way communication with ADCPs
set up to collect data
3.6.6.1.2. ADCP dialog setup¶
- Important considerations:
EA command for Ocean Surveyor can be within 10deg
NOTE that UHDAS does not use this field to calculate earth coordinates

3.6.6.1.3. Serial logging setup¶
- Important considerations:
ADCP code blocks must come first, in the same order as above
fields
subdir, ext, strings, messages, optare documented in the code.
