2.8.2. Rotation Calibration Error¶
The rotation calibration value for a cruise should be a constant, because it is based on the physical mounting angle of the transducers. (However, if someone changed particular DAS aquisition parameters, this value can appear to change during a cruise). Watertrack and bottom track calibration are our tools for determining the residual remaining in the alignment of the data. Because transducers usually stay bolted in place, it is often useful to take into account calibration values from prior or following cruises.
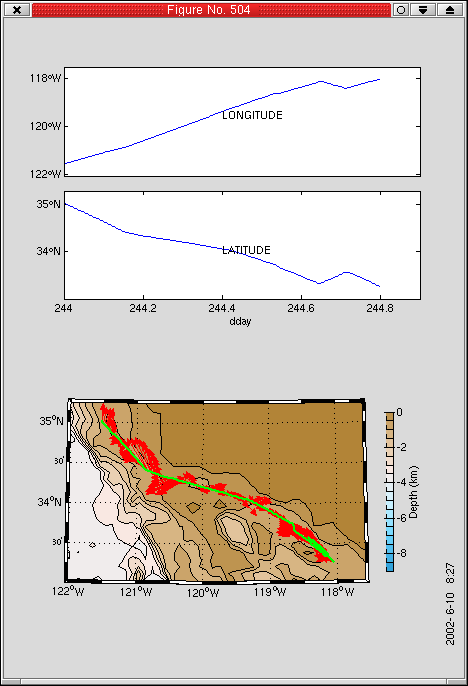
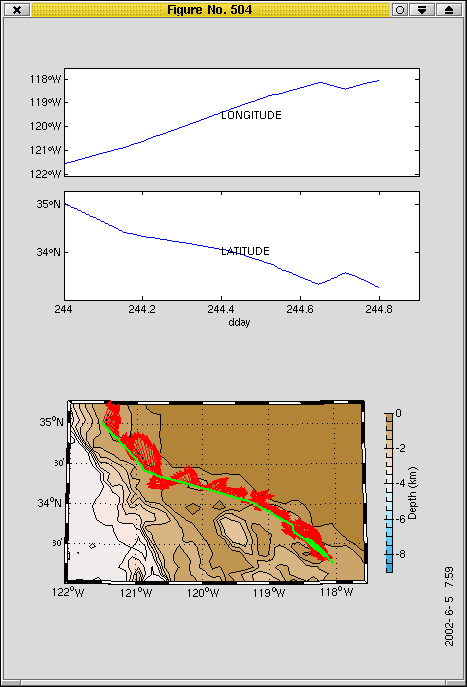
A rotation calibration error leaves a distinctive signature in the velocity since the misalignment adds a component of the ship’s speed to ocean velocity in the the cross-track direction. An error of a couple of degrees is easy to see, because it results in the ocean velocities appearing to “all flow to the right” or “all flow to the left” of the cruise track. In this example, the ship travelled to the southeast with a small course reversal towards the end of this segment. The three rotations shown below bracket the correct value (bottom).
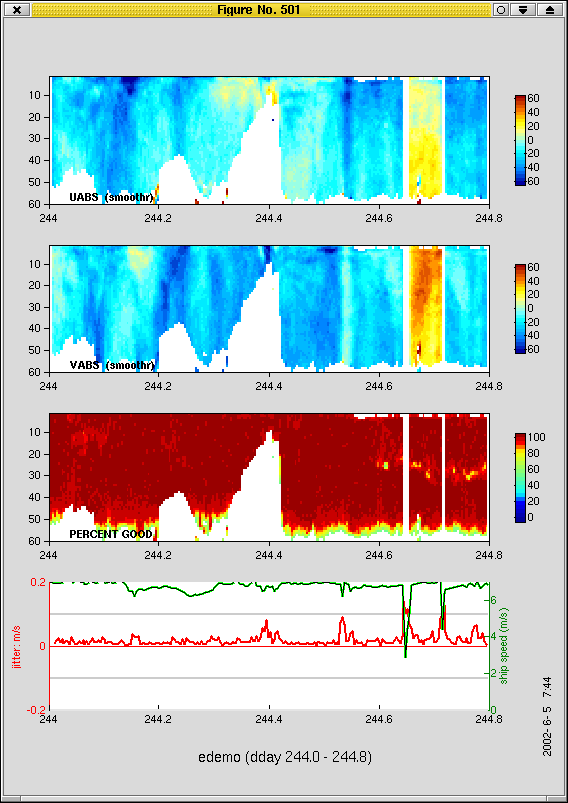
The following can be seen in the plots:
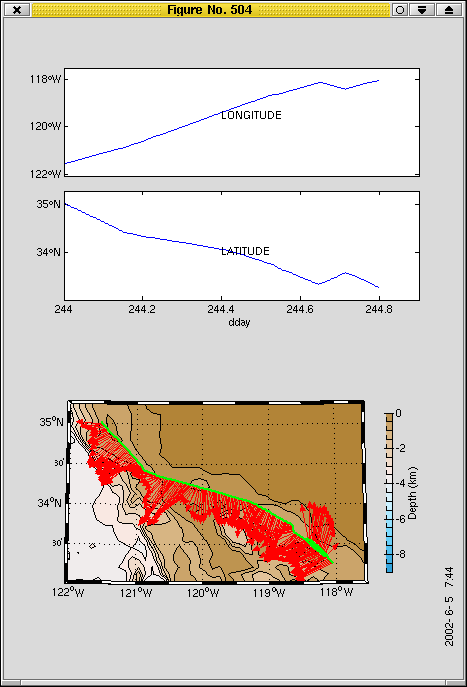
No rotation: strong flow to the right of the cruise track (seaward)
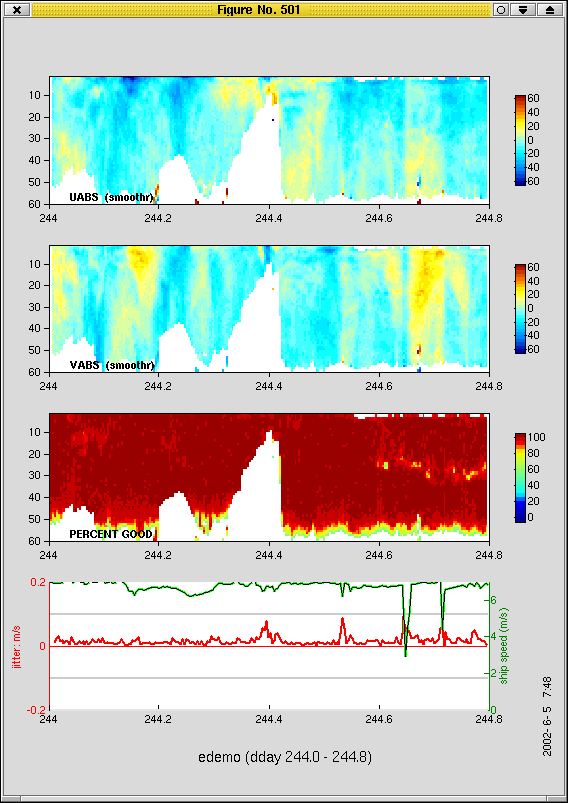
-2deg rotation: small flow to the left of the cruise track (landward)
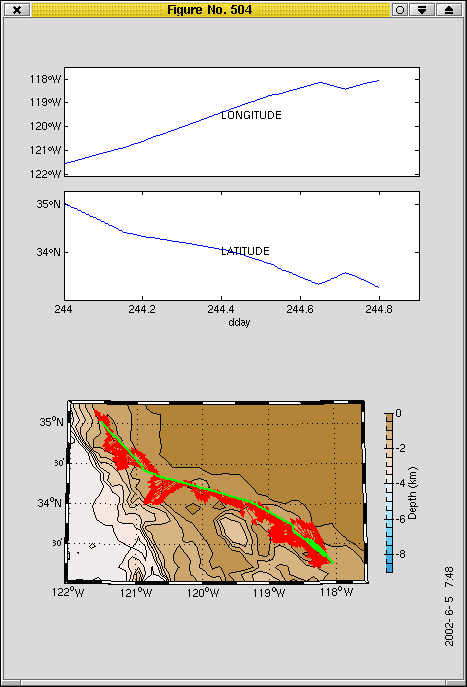
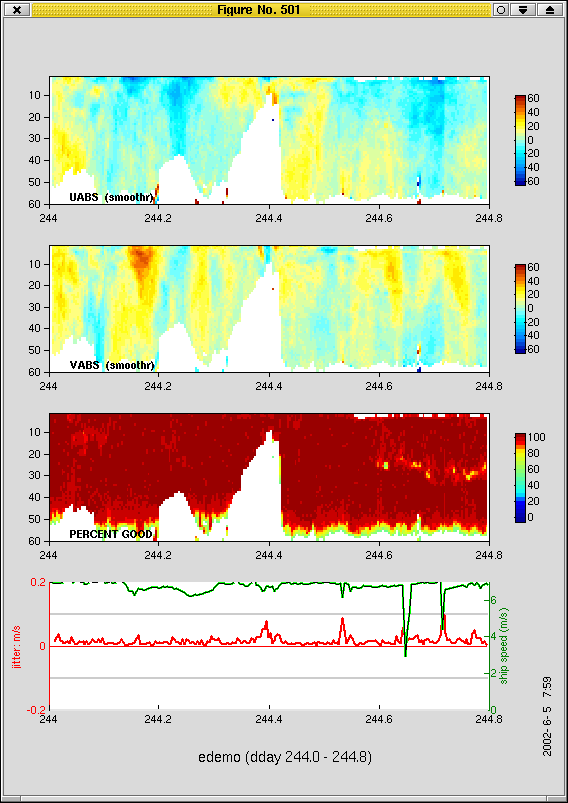
-3.6 deg rotation strong flow to the left of the cruise track (landward)
no rotation |
-2deg rotation |
-3.6deg rotation |
|---|---|---|
|
|
|
|
|
|
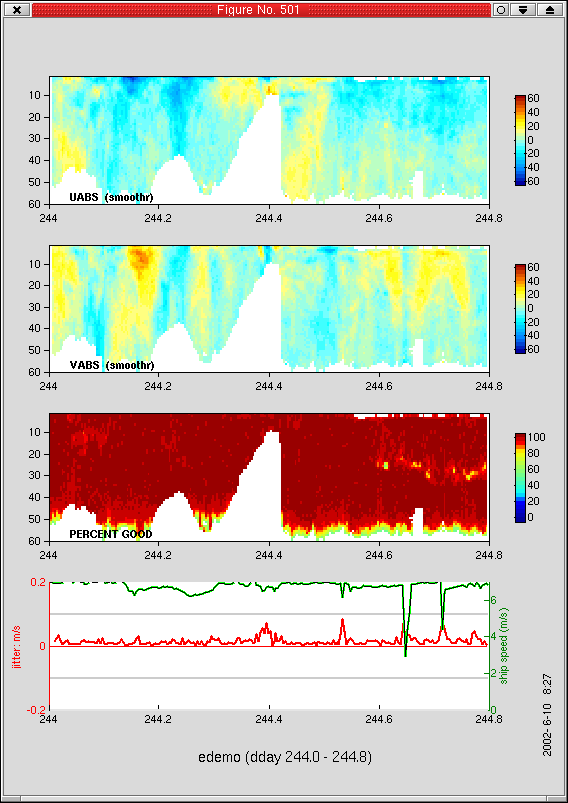
In addition to the obvious corruption of the cross-track component of flow, a more subtle signature of rotation misalignment is revealed here. The misalignment caused a strong reversal of flow when the ship reversed course (left two panels). This caused a large jump in the jitter parameter. In the right panels, (above) there is still an indication of rotation misalignment.
The correct final rotation is -2.86deg, shown below: