4.2.11. Heading error causes cross-track errors¶
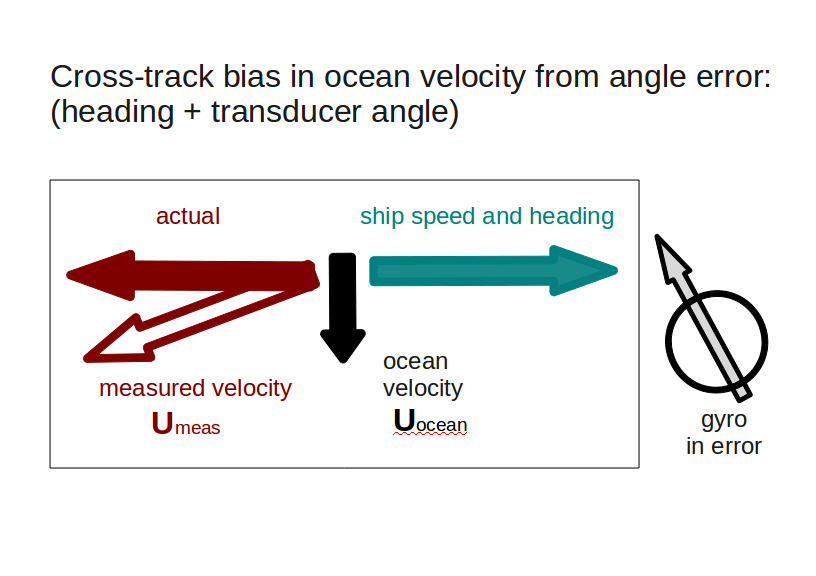
An error in heading or transducer angle will result in a cross-track bias in the ocean velocity. A good rule of thumb is “one degree error results in 10cm/s cross-track error”. Since typical open-ocean velocities are often 20-40cm/s, this constitutes a large fraction of the signal we’re interested in measuring.
Classic examples include
ADCP was re-mounted at a different angle from earlier, or a new installation goes in with an unknown transducer angle: In these cases, resurvey with bottom track or reciprocal track, reset the transducer angle, and start again with a new cruise segment.
accurate heading device failed, and a segment of data was processed using the reliable heading device only: The solution here depends on the length of the gap and whether there is a suitable substitute for the primary accurate heading device.
Follow this link (from “gautoedit” documentation) to see the effect of a rotation error on the ocean velocities. A difference of 4 degrees is enough to swing all the ocean velocities from port side to starboard side.
Note
A one-degree error will have the same effect on ocean velocities, whether it comes from an error in transducer angle or an error in heading. RULE OF THUMB one degree error in heading is .1m/s error in cross-track velocity.
the riddle
The next two pictures show the real ocean. But are those swings of ocean velocity from port to starboard real? or are they caused by a heading error? An error of 1 degree would be enough to do this, and it is essentially in the cross-track direction, so it is consistent with a heading error.
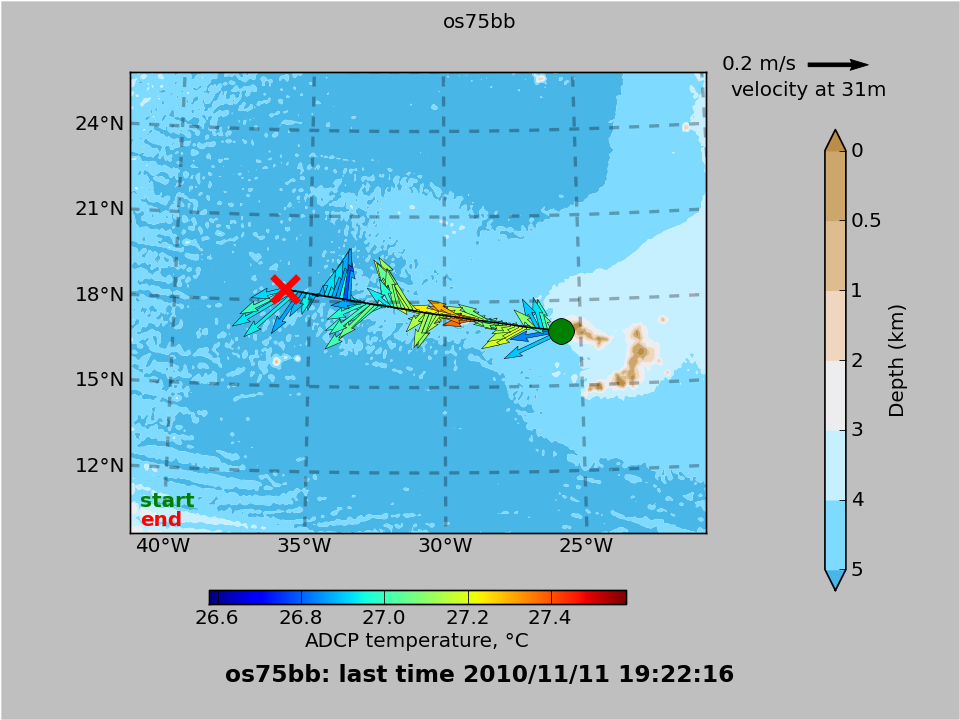
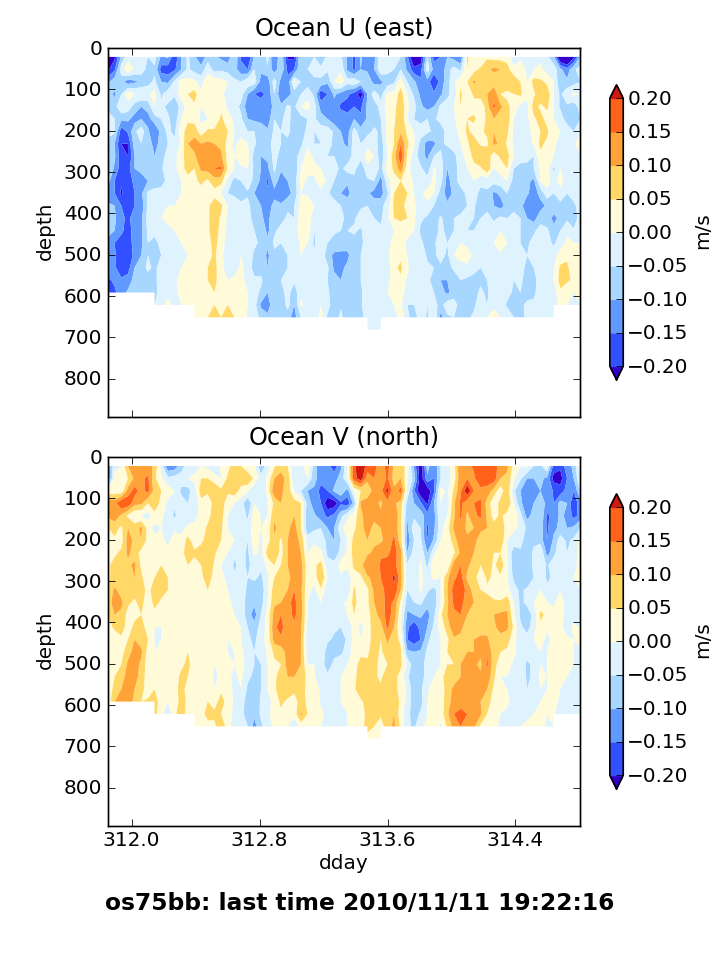
Because we know the heading is calculated using an accurate heading device, and that heading device was working, this is actually a representation of ocean currents, not an artifact.