3.5.1. UHDAS serial port access gui: tk_terminal.py¶
The UHDAS computer has a terminal emulation program for access to serial ports. The program allows the user “adcp” to
choose a serial port
change baud rate
change parity, stop bit, [etc]
send commands
view data on the specified serial port (often /dev/ttyUSB*)
capture a dialog or incoming messages
This program is written in python and tk and is accessed on the command line as:
tk_terminal.py
This program can be run to look at ascii serial data streams or to communicate with an Ocean Surveyor, Workhorse, or Broadband RDI ADCP. To communicate with an NB150, use rditerm.py
Note
Do not run this program to access a serial port which is in use by UHDAS or at least not while UHDAS is running. To see a list of configured ports, type:
cat /home/adcp/config/sensor_cfg.py
UHDAS locks the serial ports so it will not be confused. Do not use tk_terminal.py to access any ports listed here:
ls /var/lock/tty*
tk_terminal.py should not allow you to choose a serial port that
is locked, but it is always safest to check. Error messages are
written to the terminal window which called the program.
3.5.1.1. Serial Settings (Baud rate, COM Port, etc)¶
Starting tk_terminal.py
Choose the port
Choose the Baud rate
Connect to the port
Under the File menu, choose Connect to port. This opens the port for communication. Be sure to Disconnect when you are finished, or if you are going to change settings (or it will get confused).

Saving input
If the serial port is connected to a device with serial messages spewing forth, you should see those in the tk_terminal window. To stop the flow, choose Disconnect from the File menu.
The rest of the menu options under the File menu are related to saving input. You can
clear the screen (“clear”)
save what exists there (“save previous”)
start a log file (“start saving”)
stop a log file (“stop saving”)
close the connection (“Disconnect”)
3.5.1.2. Waking up the ADCP¶
Establishing Communication
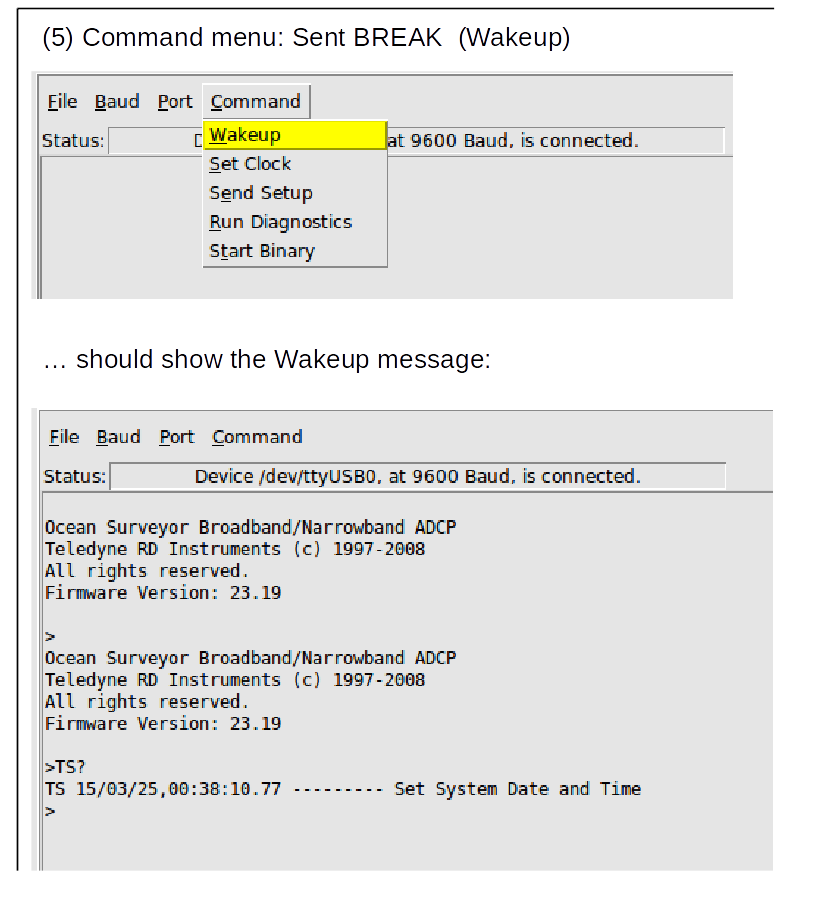
After setting up the Port and Baud rate, and connecting to the port (to allow 2-way communication), you must wake up the instrument. By sending a BREAK to the instrument, and seeing the “Wakeup” message, you have established that the above settings are correct, the cable works, the instrument has power and can communicate.
RDI documentation will tell you to do these things with BBTALK but that is unnecessary. You have tk_terminal.py
Use the Commands menu item and choose Wakeup
3.5.1.3. Sending commands to the ADCP¶
When troubleshoooting ADCP problems, you may be asked to
send some commands to the instrument. These can be run with
tk_terminal.py; you do not need BBTALK.
With the tk_terminal.py interface, you can send commands to the
instrument by simply typing in the text box at the bottom of the
window (the one that says Run next to it)
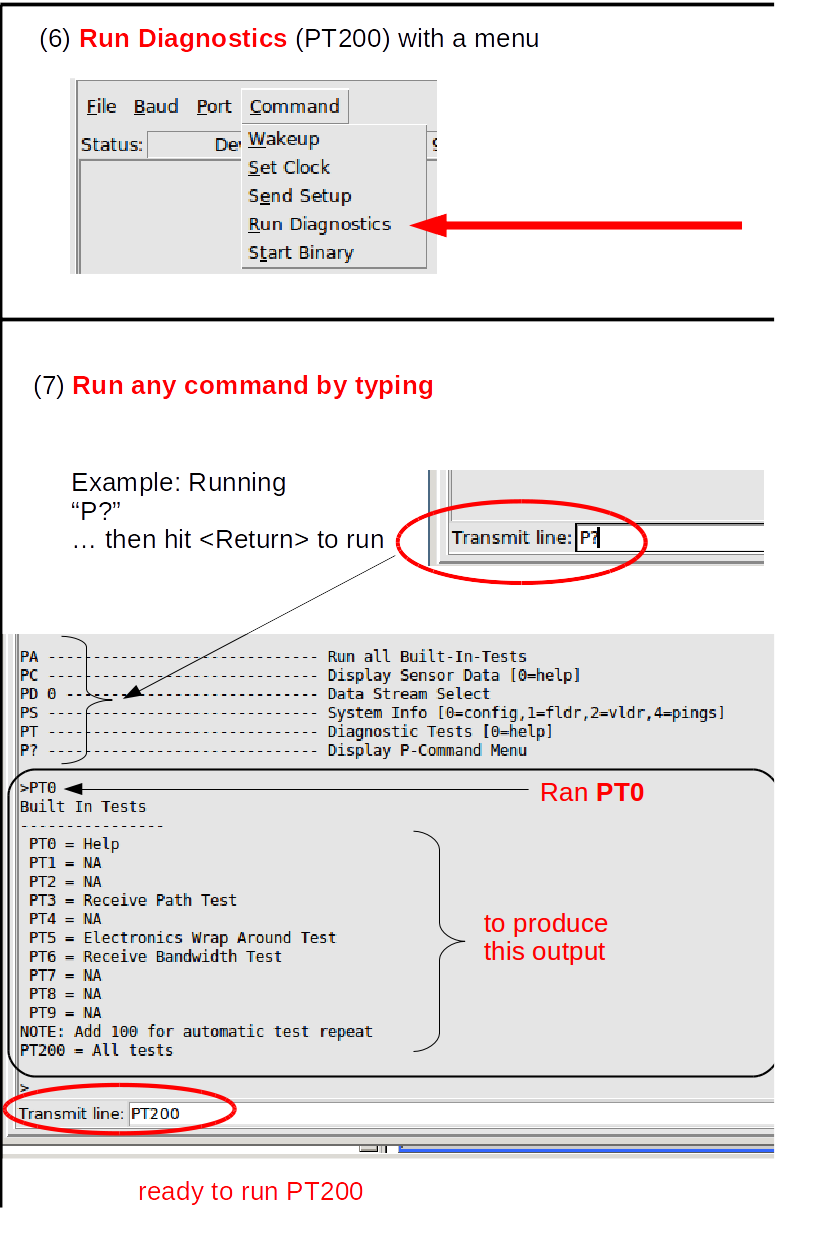
Most RDI ADCPs allow you to start figuring out the commands they know by typing a ? (question mark). If you type a ? you will see what kinds of commands they know.
For example, the diagnostic tests on the ocean surveyor are usually commands that start with “P”. You can send P? to see what they are.
Warning
DO NOT PING OCEAN SURVEYOR IN AIR
A similar approach works with a BB or Workhorse ADCP.
Type type ?,
look for a menu item for tests
and type that letter followed by ?.
NB150 is much more cryptic and you have to read the manual
Note
It is OK to ping fixed transducers in air, (BB300, NB150 or Workhorse)