2.7.3.5. Combining Bottomtrack and Watertrack for more coverage¶
Note
Doing this indicates desperation.
2.7.3.5.1. Watertrack and Bottomtrack¶
The following example shows various places within the ADCP processing directory where the same number will show up for watertrack or bottom track calibration. In this example, the calibration is indicating a correction of about -3deg. positive is clockwise).
cal/watertrk/adcpcal.out:
Number of edited points: 16 out of 28 amp = 0.9991 + -0.0266 (t - 101.3) phase = -3.00 + 0.0763 (t - 101.3) median mean std amplitude 0.9970 0.9991 0.0169 phase -2.9865 -2.9983 0.8038 <==== about -3deg
“apply phase correction”: apply the number found in #1:
quick_adcp.py --steps2rerun rotate --rotate_angle -3.0
the phase in the watertrack
calibration picture(cal/watertrk/wtcal1.png)If you were to make a file with time-dependent heading corrections to apply, you make a file called (for instance) new_hcorrs.ang, with 2 columns (decimal day, angle) and the angles should be around -3.0. Then the effect of the command below is the same as #2 above:
rotate rotate.tmp
For instance:
## begin rotate.tmp DB_NAME: ../../adcpdb/a_nf LOG_FILE: rotate.log TIME_RANGE: all OPTION_LIST: water_and_bottom_track: year_base= 2015 time_angle_file: new_hcorrs.ang amplitude= 1 angle_0= 0 end end
When redoing the heading alignment angle, the value of -3.0 (i.e. what watertrack or bottom track estimated) is used like this:
transducer_angle = xxx.yy calibrations (watertrack and bottom track) indicate a value of -3.0 new_transducer_angle = xxx.yy - (-3.0)
{kind=link}
2.7.3.5.2. Time-dependent Heading Correction¶
If an accurate heading device exists, that will be the best final reference for heading. Watertrack and bottom track calibration indicate the constant offset necessary to corectly align the transducer.
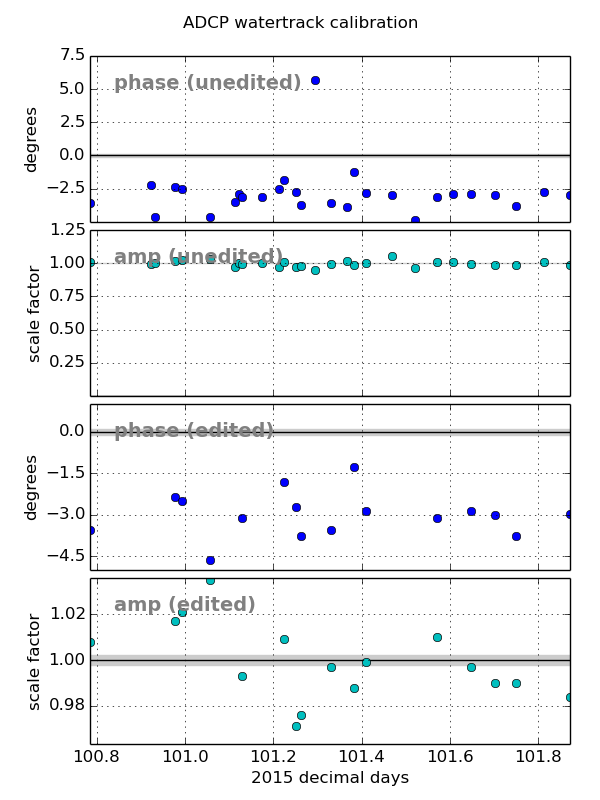
If there is no accurate heading device, you might end up with a situation like the one below, with a mix of watertrack and bottom track points suggesting a time-dependent calibration:

After writing out a file with the proper format and applying the correction, the remaining calibration is noisy, but does not indicate any biases or anything else we can fix.

Here’s another cruise with watertrack and bottom track data from two instruments, showing a time-dependent correction that can be made (in the absence of an accurate heading device).
