2.4.3. LTA Postprocessing Demo¶
Note
Directory Strategy
To simplify the documentation, these instructions assume you have set up your directories as in Directory Setup and you are doing your processing demos in my_codas_demos/adcp_pyproc
your practice directory source
----------------------- -----------
my_codas_demos
my_codas_demos/adcp_pyproc (new, WORKING IN HERE)
my_codas_demos/uhdas_data copy of codas_demos/uhdas_data
my_codas_demos/vmdas_data copy of codas_demos/vmdas_data
my_codas_demos/uhdas_style_data (new, empty, for VmDAS conversion)
Scenario:
You want a nice-looking LTA dataset.
To get the most out of this example, you should have already gone through the CODAS post-processing demo. In both cases you are working with data that is already averaged, so there are many things you cannot do. LTA processing is just “converting the LTA files into CODAS averages” followed by “CODAS post-processing”, so definitely be familiar with the post-processing example.
Resources
command-line help:
quick_adcp.py --commands ltapytext file (with metadata) from an actual processing directory This file narrates the steps in the manual LTA processing, including postprocessing.
dataviewer.py documentation (viewing and editing)
the rest of this web page
Directory Strategy
Preliminary processing has already been done, using one of the following schemes:
adcp_database_maker.py
vmdas_quick_adcp.pymanual steps:
vmdas_info.pyandadcptree.py
Start making notes
Keep your notes in a file adjacent to the newly created
processing directory. For this illustration, the text
file will be called os75bb_LTA_postproc.txt.
The processing directory for this example will be os75bb_LTA,
the one created by adcp_database_maker.py
Note
Everything below here is post-processing. You can look at another example in the UHDAS post-processing demo.
We are doing this work in the preliminary processing directory created
by adcp_database_maker.py but it could be any of the LTA CODAS
processing directories.
Start by going to the vmdas project directory:
cd ~/my_codas_demos/adcp_pyproc/ps0918_vmdas
pwd
The result should be:
/home/adcpproc/my_codas_demos/adcp_pyproc/ps0918_vmdas
Useful Extra step: copy this entire processing directory “as it stands”
(with no changes) so we can compare our final product to this
original LTA data, for example call the copy os75bb_LTA_postproc.
You can do that on the command-line before we start. In the ps0918_vmdas
project directory, run this command:
cp -a os75bb_LTA os75bb_LTA_postproc
Now there are two processing directories. We will compare them later.
os75bb_LTA
os75bb_LTA_postproc
Last but not least, start a text file with notes:
emacs os75bb_LTA_postproc.txt &
Now change directories into the CODAS processing directory
os75bb_LTA_postproc for the rest of the post-processing:
cd os75bb_LTA_postproc
DISCOVERY
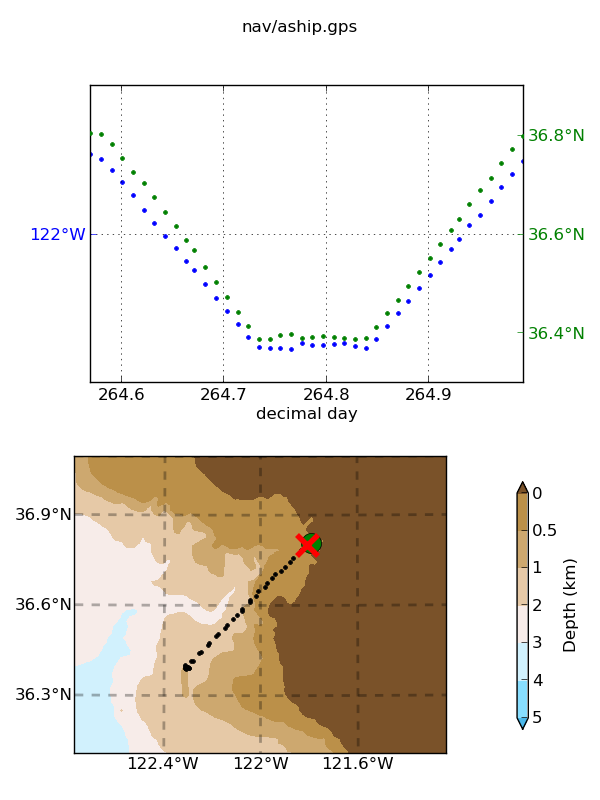
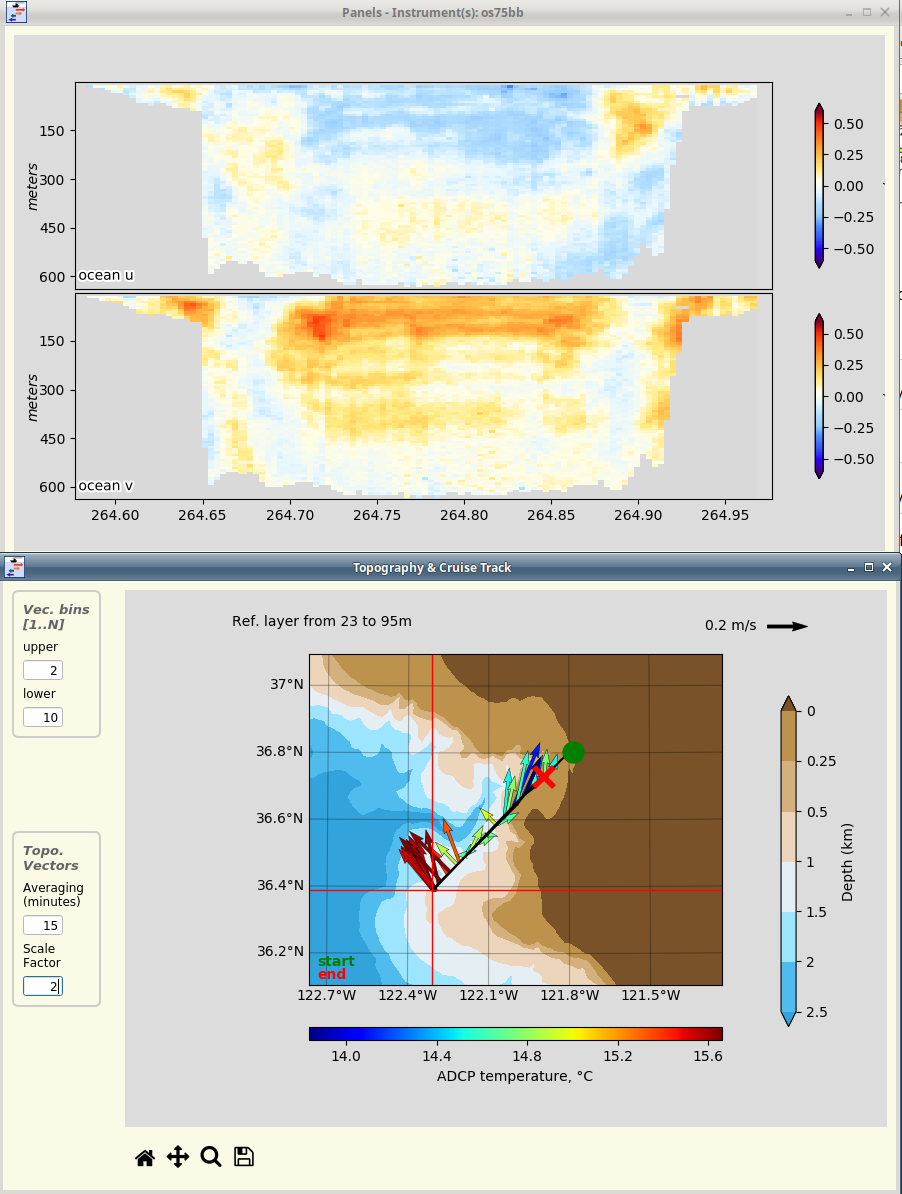
Make a cruise track to see what to expect. We are still in the
os75bb_LTA_postproc directory.
Make a cruise track plot:
plot_nav.py nav/aship.gps
PLOTS
Run this command to look at all the plots:
figview.py
- You are looking for
glitches in heading
gaps in the data
issues with calibration
CHECK CALIBRATION
This is a short out-and-back cruise; probably no watertrack
calibration data, vmdas_info.py showed that there is bottom track
data. Even though it is a reciprocal track, the cruise is coastal
(strong currents) and takes too much time (too large a fraction of a
tidal cycle) to use the reciprocal track for calibration.
Note
HINT: The CODAS virtual machine has three little Python programs to speed up the discovery process looking at the calibrations. You can type these shortcuts to look at the calibrations, which really speeds things up.
shortcut: looking for what it does (but prettier)
-------- ------------ -----------------------------
catwt.py watertrack cal tail -20 cal/watertrk/adcpcal.out
catbt.py bottomtrack cal tail -6 cal/botmtrk/btcaluv.out
catxy.py ADCP-gps offset tail -6 cal/watertrk/guess_xducerxy.out
check calibration:
**bottomtrack** ------------ unedited: 36 points edited: 33 points, 2.0 min speed, 2.5 max dev median mean std amplitude 0.9998 0.9998 0.0025 <==== no change needed phase 1.3538 1.5970 0.5428 <==== probably apply 1.5 ------------ **watertrack** Number of edited points: 2 out of 2 amp = 1.0040 + 0.1053 (t - 264.8) phase = 1.42 + 15.5789 (t - 264.8) median mean std amplitude 1.0040 1.0040 0.0085 phase 1.4200 1.4200 1.2558 <=== "consistent" given that we only have 2 points
So ‘yes’, bottom track; not much watertrack, but it is at least consistent.
Look at the bottom track calibration figure. Note that the phase offset is DIFFERENT on the outbound and inbound legs: That means this dataset was collected using an inaccurate heading device (gyro) so it really needs to be reprocessed with the Ashtech (accurate heading device) used for heading.

DATAVIEWER
Look at the data
dataviewer.py
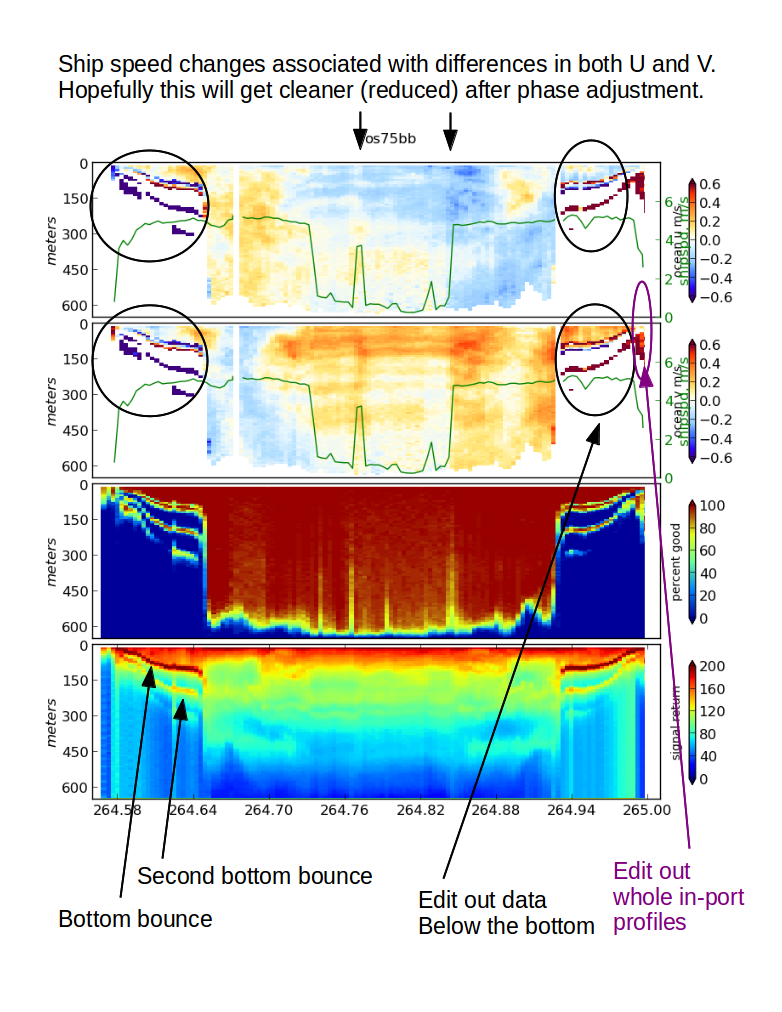
Adjust the phase calibration first.
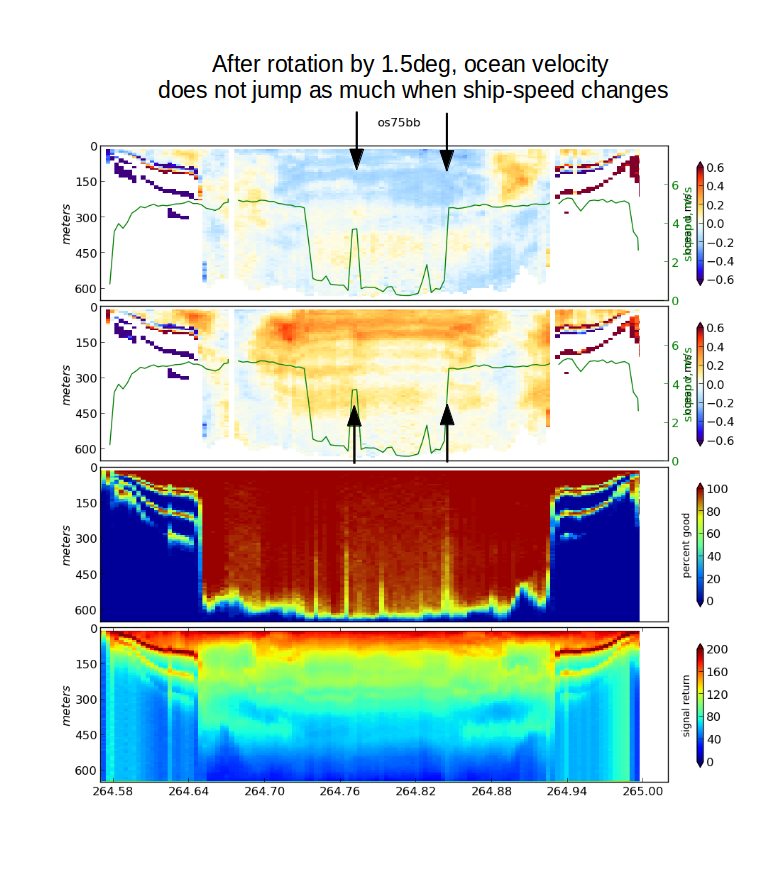
Apply rotation correction (no scale factor necessary):
quick_adcp.py --steps2rerun rotate:navsteps:calib --rotate_angle 1.5 --autoCheck calibration again:
**bottomtrack** ------------ unedited: 36 points edited: 33 points, 2.0 min speed, 2.5 max dev median mean std amplitude 0.9994 0.9997 0.0026 phase -0.1377 0.0942 0.5405 This is "close enough" to allow editing at this point
Now look again with dataviewer. The ‘jumps’ at the two arrows are either gone or at least more subtle.
You can also see the vectors are agreeing better:
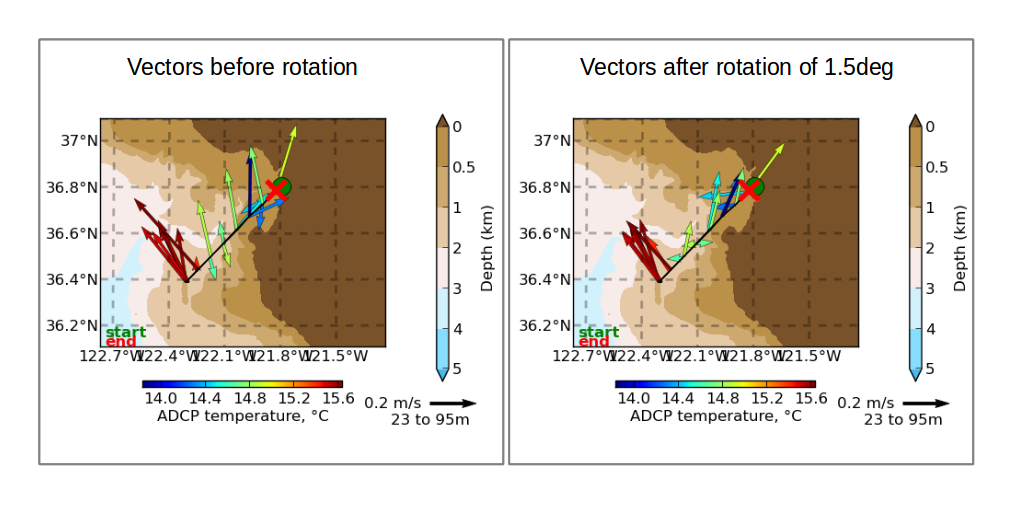
EDITING
Now edit out any bad data. See dataviewer.py documentation
Edit bad data:
dataviewer.py -eApply editing:
quick_adcp.py --steps2rerun apply_edit:navsteps:calib --auto
Now look again at the final data:
COMPARE
Now can compare them (before and after) by running the following command:
cd ..
dataviewer.py -c os75bb_LTA os75bb_LTA_postproc
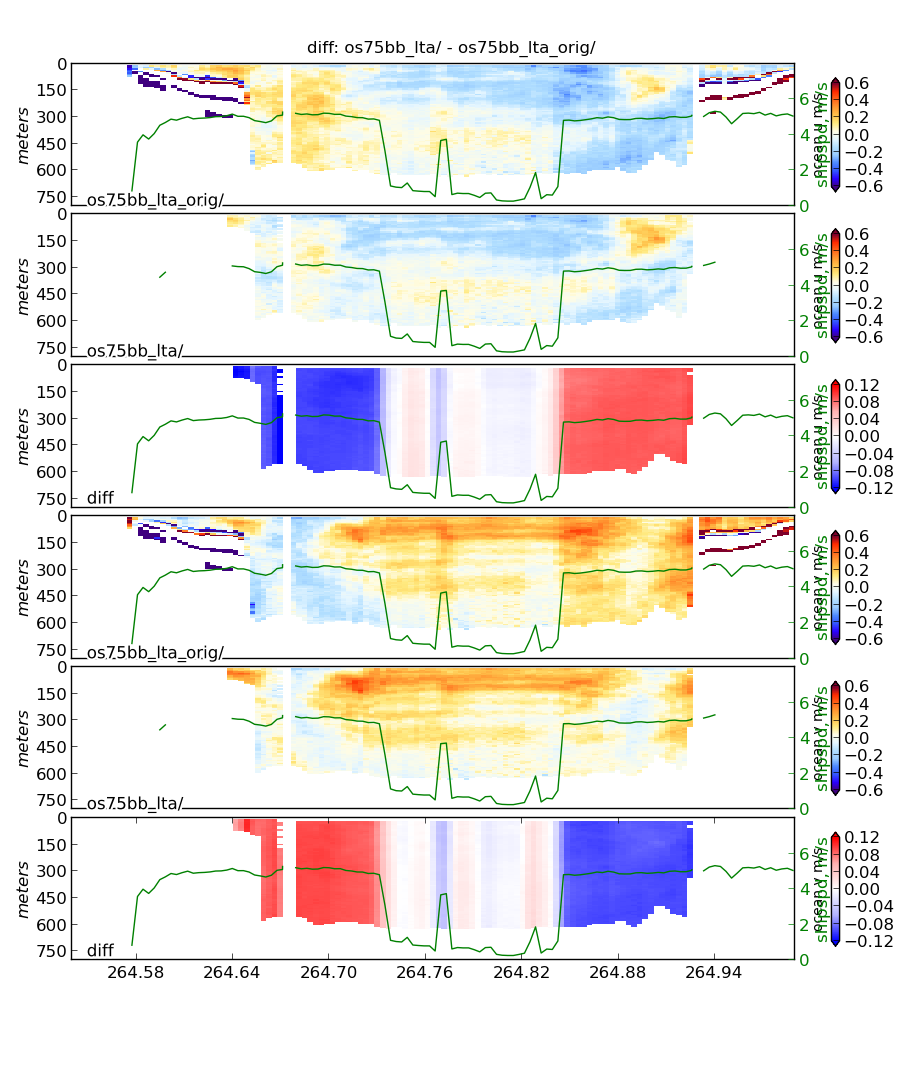
Notice the 10-12cm/s difference in the ocean velocity during the transit legs: that comes from the 1.5deg rotation. The effect of editing is obvious.
Note
Rule of thumb: 1 deg heading error causes a 10cm/s cross-track error in ocean velocity.
We’re near the end of the processing for this dataset now.
Review the data:
Check calibration one more time (look in
cal/botmtrk/btcaluv.out)Look at the figures again:
figview.py --type pngCheck editing again (
dataviewer.py)- Add comments to your processing documentation about
interesting features, problems
final (complete) calibration values used
DATA PRODUCTS
web plots
netCDF files
matlab files
Now make web plots with quick_web.py:
make web plots:
cd os75bb_LTA_postproc quick_web.py --interactiveIf you get a complaint about “already exists”, then you can just update the figures with:
quick_web.py --redoView with a browser, look at webpy/index.html:
firefox webpy/index.html
When you’re satisfied, extract the data for other people to use.
Data Products
extract matlab data:
quick_adcp.py --steps2rerun matfiles --auto
The matlab files created are
vector/vector_uv.mat,vector/vector_xy.mat
contour/contour_uv.mat,contour/contour_xy.mat
contour/allbins_*.mat
The contents of these matlab files and the netCDF file we generate are documented (See here in the CODAS documentation, in the section concerning ways to access ADCP data.
For this cruise, to get a NetCDF file
contour/os75bb.ncrun this command:adcp_nc.py adcpdb contour/os75bb ps0918_demo os75bb --ship_name Point Sur
To check netcdf file:
ncdump -h contour/os75bb_short.nc
Note
CODAS processing uses zero-based decimal days. See CODAS Conventions
Note
When you are done with all the processing, with permission from the Principal Investigator, we encourage you to submit the data to the Joint Archive for Shipboard ADCP so you get credit for your data collection and processing, and other people can use it too.
Available Demos
adcp_database_maker.py
commandline details