2.5.1. UHDAS Single-ping Commandline¶
Resources
command-line help:
quick_adcp.py --commands uhdaspytext file (with metadata) from an actual final processing directory
dataviewer.py documentation (viewing and editing)
the rest of this web page
Note
Directory Strategy
To simplify the documentation, these instructions assume you have set up your directories as in Directory Setup and you are doing your processing demos in my_codas_demos/adcp_pyproc
your practice directory source
----------------------- -----------
my_codas_demos
my_codas_demos/adcp_pyproc (new, WORKING IN HERE)
my_codas_demos/uhdas_data copy of codas_demos/uhdas_data
my_codas_demos/vmdas_data copy of codas_demos/vmdas_data
my_codas_demos/uhdas_style_data (new, empty, for VmDAS conversion)
Make a project directory to work on this cruise.
This directory will be called km1001c_uhdas, and will hold notes and
the individual Processing Directory for each sonar.

Instructions
Note
We start work in the project directory so change directories to that location
cd ~/my_codas_demos/adcp_pyproc/km1001c_uhdas
pwd
The result should be:
/home/adcpproc/my_codas_demos/adcp_pyproc/km1001c_uhdas
start making notes: We will be processing the os38nb data,
so call the file os38nb_fullproc.txt.
(1) create processing configuration file
In order to perform the preliminary processing, we need to generate a suitable configuration. This resides in the Config Directory, and contains instructions for processing data from this cruise, such as transducer depth, transducer angle and ancillary data sources (heading and attitude). This new file contains modern settings and modern syntax for the specified ship. The settings may be different from the settings that are appropriate for your cruise (eg. an older cruise may have different serial feeds available). So we create a new file, with modern syntax and variable names, and then edit as needed. There is no GUI for this step.
First, verify that we are in the project directory km1001c_uhdas:
pwd
The result should be:
/home/adcpproc/my_codas_demos/adcp_pyproc/km1001c_uhdas
Now we make the config directory to hold cruise-level
processing information. Make the directory (if it does not exist) and change
directories to go inside:
mkdir config
cd config
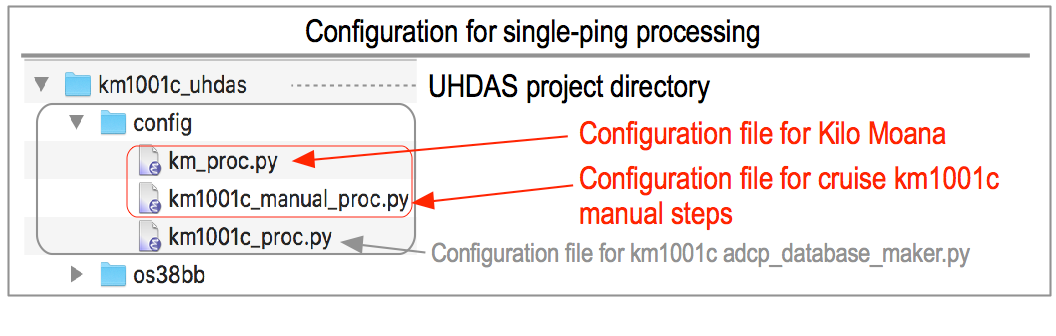
This example is a Kilo Moana cruise: km1001c. Make the configuration file and edit for the appropriate cruise name and year. This file is Python code, so be careful about your syntax when you edit the file: leave punctuation and indentation “as is”.
Make the configuration file:
uhdas_proc_gen.py -s km
This creates a file called “km_proc.py”
Copy to a new version for our cruise (use the cruisename km1001c_manual):
cp km_proc.py km1001c_manual_proc.py
Edit the file and add these four (4) lines to the top of km1001c_manual_proc.py, for instance:
emacs km1001c_manual_proc.py &
Add these line to the top:
# --- begin section to add ---
# full path to uhdas data directory (do not use relative path)
uhdas_dir = '/home/adcpproc/my_codas_demos/uhdas_data/km1001c'
yearbase = 2010 # usually year of first data logged
shipname = 'Kilo Moana' # for documentation
cruiseid = 'km1001c' # for titles
# --- end of section to add ---
Now go back one level to km1001c_uhdas:
cd ..
The contents of km1001c_manual_proc.py is outlined
here.
Your new file, km1001c_manual_proc.py has been created using modern
syntax, variable names, and recent settings for this ship. The older
the dataset you are reprocessing, the more likey there have been
changes to the configuration file. The most likely things to have
changed are:
transducer angle
position instrument
heading instrument
heading correction instrument
The original settings are stored in the config directory
in the at-sea processing directory (in the proc directory inside
the UHDAS data) for the instrument, for example:
my_codas_demos/uhdas_data/km1001c/proc/os38nb/config
The files that were actually used for the preliminary processing ran the generation of code when the cruise took place.
Note
For this demo, there are no substantive differences between then and now.
(2) Create the CODAS processing directory
Now create the processing directory. We do this within
the UHDAS km1001c project directory, km1001c_uhdas. There may be several
CODAS processing directories adjacent to each other, for instance
postprocessing demo
UHDAS preliminary processing using adcp_database_maker.py
UHDAS preliminary processing (using command-line instructions)
The “cruisename” argument is used to identify which config/*_proc.py file we will use. By using cruisename=”km1001c_manual” we identify config/km1001c_manual_proc.py as the file we want.
You should be in the project directory, i.e. km1001c_uhdas:
cd ~/my_codas_demos/adcp_pyproc/km1001c_uhdas
pwd
The result should be:
/home/adcpproc/my_codas_demos/adcp_pyproc/km1001c_uhdas
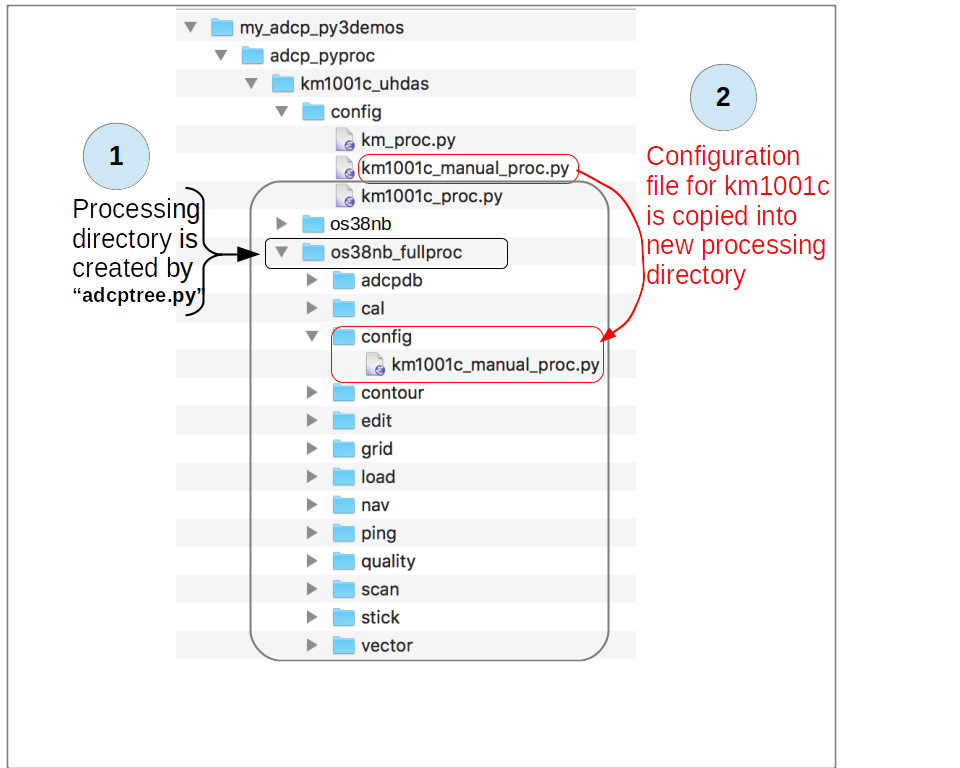
Set up the processing directory by typing:
adcptree.py os38nb_fullproc --datatype uhdas --cruisename km1001c_manual
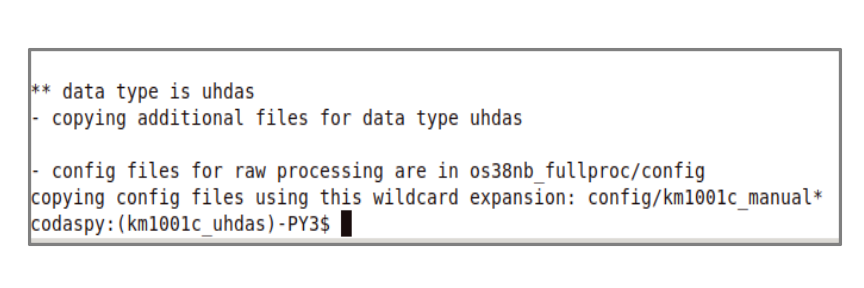
If you are successful thus far, your new adcp processing
directory os38nb_fullproc should have a new config directory
also with km1001c_manual_proc.py in it. The screen messages from
adcptree.py will look like this:
Warning
Do not proceed if you do not have
os38nb_fullproc/config/km1001c_manual_proc.py If you do not
have this file, check the cruisename specified when calling
adcptree.py.
This figure shows where the new config directory lands, and the file
in it that will be used for processing:
(3) Create q_py.cnt control file
Now we will make the control file (q_py.cnt) for quick_adcp.py
to use in processing. Preliminary processing uses most of the variables
that were set up in step (2). There are other parameters which depend
on the ADCP model etc, and those are stored in the q_py.cnt file.
During preliminary processing, quick_adcp.py uses --cruisename to
find the configuration file config/km1001c_manual_proc.py and reads
those values. The control file below sets additional
variables.
The rest of the work takes place INSIDE the processing directory
(3a) change directories to the processing directory just created:
cd os38nb_fullproc
- (3b) create a quick_adcp.py control file called: q_py.cnt. This requires
opening the file with an editor and pasting the contents in:
####----- begin q_py.cnt------------ ## all lines after the first "#" sign are ignored --yearbase 2010 --cruisename km1001c_manual # used to identify configuration files # *must* match prefix of files in config dir --update_gbin ## NOTE: You should generally remake gbins ## - you are not sure ## - if parameters for averaging changed ## - various other reasons. ## ==> MAKE SURE you move the original gbin directory ## to another name first!! Default directory ## to make gbins is in uhdas_dir ## or... alternatively, use this parameter --configtype python ## use km1001c_manual_proc.py for configuration --sonar os38nb --dbname aship --datatype uhdas --ens_len 300 --ping_headcorr ## applies heading correction. ## this ONLY works if there is a heading ## correction device specified in the ## config/km1001c_manual_proc.py file --max_search_depth 3000 #if the topography says the ocean is deeper # than this, do not autodetect the bottom. # (reduces likelihood of shallow scattering # layers being identified as the bottom)
In linux you can also use this shortcut, called a “heredoc”.
Now we are ready to set and run the single-ping processing.
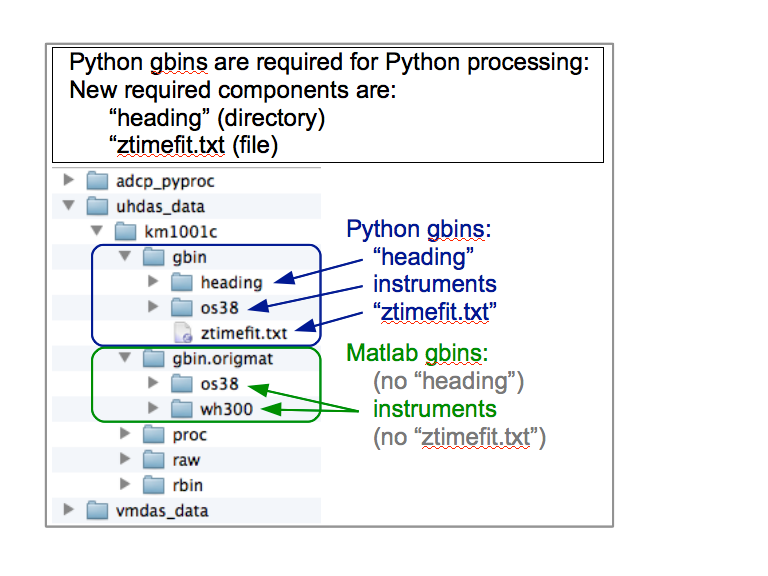
This will also make new gbins.
Because we must remake the “gbin” files, YOU MUST RENAME THE ORIGINAL GBIN DIRECTORY
to another name, eg gbin.origmat, or quick_adcp.py will fail! First, see what
is there:
ls ../../../uhdas_data/km1001c/
Then rename the gbin directory:
mv ../../../uhdas_data/km1001c/gbin ../../../uhdas_data/km1001c/gbin.orig
ls ../../../uhdas_data/km1001c
(4) Run quick_adcp.py to do the preliminary processing
Now run the command to actually perform the preliminary processing:
quick_adcp.py --cntfile q_py.cnt --auto
Note
You can use the --auto option to speed through the preliminary processing
and not ask any questions, or if you leave it out, you must answer with ‘yes’
each time, but you get to read the steps being performed.
Note the difference between the old Matlab gbin directory and new Python gbin directory:
Everything below here is CODAS Post-processing
Check processing:
look at all figures (
figview.py --type png)look at heading correction: does it need to be patched?
look at watertrack and bottom track calibrations: what can we expect?
Figures to look at
directory |
files |
information |
|---|---|---|
nav |
|
cruisetrack |
nav |
|
reference layer |
edit |
|
temperature |
edit |
|
pings per average |
cal/rotate |
|
heading correction |
cal/watertrk |
|
watertrack calib |
cal/botmtrk |
|
bottomtrack calib |
A nicer cruise track plot can be made by running this:
plot_nav.py nav/aship.gps
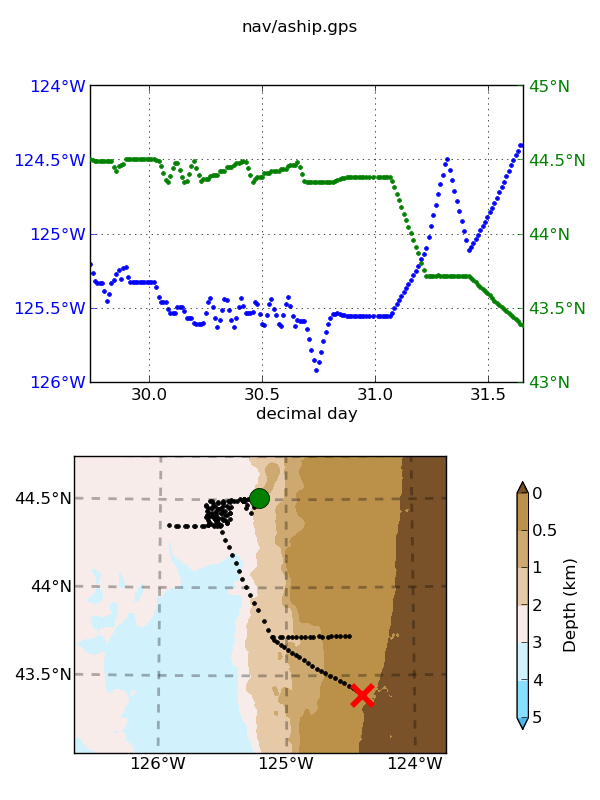
review data
heading correction device:
figview.py cal/rotate/*png
Conclude: no action needed : note that in your text file
check calibration: (cal/watertrk/adcpcal.out):
**watertrack** ------------ Number of edited points: 34 out of 35 amp = 1.0074 + -0.0033 (t - 30.3) phase = 0.05 + 0.1635 (t - 30.3) median mean std amplitude 1.0080 1.0074 0.0064 <== pretty close to 1.0 phase 0.0900 0.0511 0.4541 <== pretty close to 0.0 ------------
Watertrack calibration indicates calibration is close; we can go ahead and edit without editing out “false anomalies”.
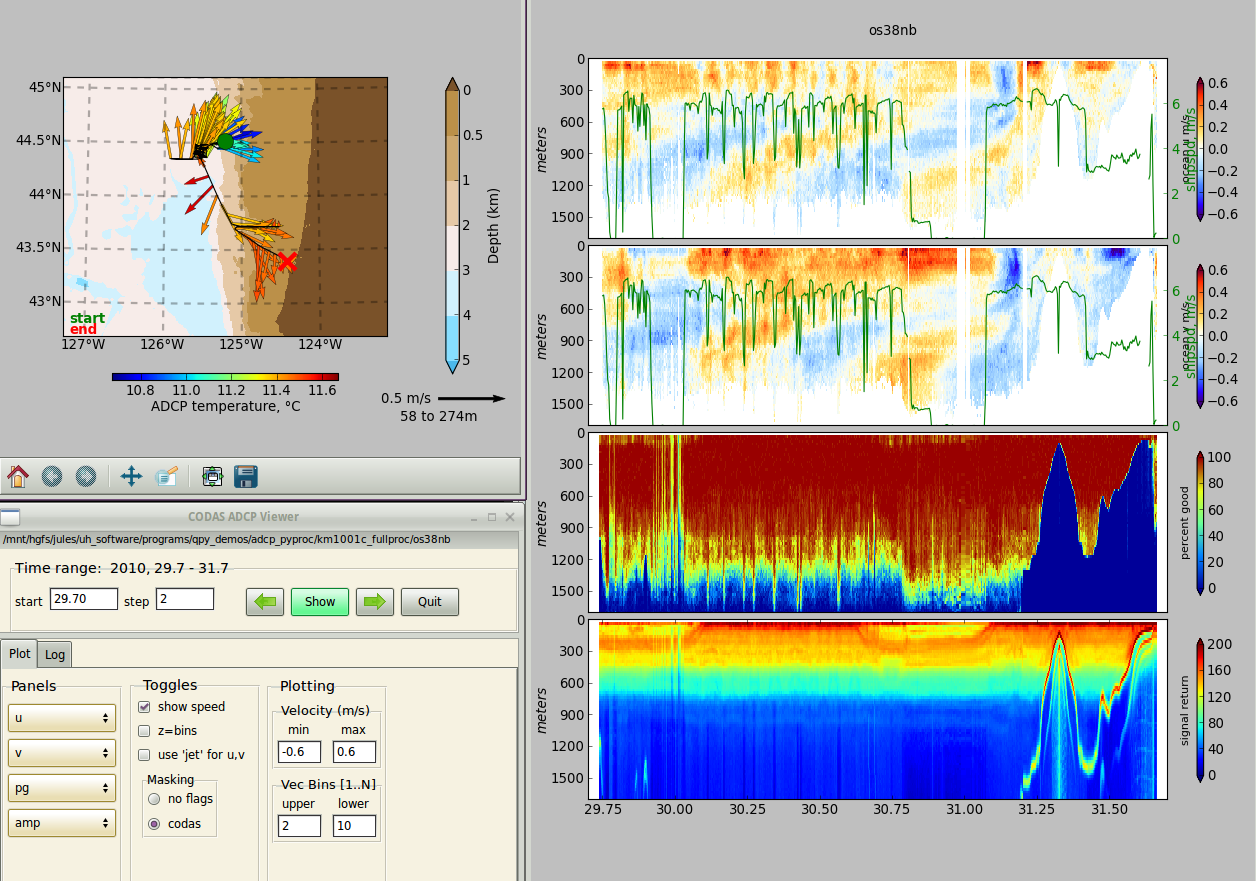
look at the data
dataviewer.py
Here is the view:
Now edit out any bad data. See dataviewer.py documentation
dataviewer.py -e
Apply editing
quick_adcp.py --steps2rerun apply_edit:navsteps:calib --auto
Now look at everything again.
check editing – looks OK
dataviewer.py
check calibrations again (cal/watertrk/adcpcal.out)::
**watertrack**
------------
Number of edited points: 34 out of 35
amp = 1.0071 + -0.0020 (t - 30.3)
phase = 0.05 + 0.1809 (t - 30.3)
median mean std
amplitude 1.0080 1.0071 0.0058
phase 0.0900 0.0494 0.4431
------------
still need scale factor::
quick_adcp.py --steps2rerun rotate:navsteps:calib --rotate_amplitude 1.007 --auto
check calibrations again (cal/watertrk/adcpcal.out)::
**watertrack**
------------
Number of edited points: 34 out of 35
amp = 1.0001 + -0.0018 (t - 30.3)
phase = 0.05 + 0.1840 (t - 30.3)
median mean std
amplitude 1.0010 1.0001 0.0058
phase 0.0935 0.0496 0.4439
------------
phase correction is very small. Here is how you would apply it::
quick_adcp.py --steps2rerun rotate:navsteps:calib --rotate_angle 0.06 --auto
check calibration again::
**watertrack**
------------
Number of edited points: 34 out of 35
amp = 1.0001 + -0.0018 (t - 30.3)
phase = -0.01 + 0.1828 (t - 30.3)
median mean std
amplitude 1.0010 1.0001 0.0057
phase 0.0365 -0.0095 0.4437
------------
We’re near the end now
Review the data:
Check calibration one more time (either try looking in
cal/botmtrk/btcaluv.outand/orcal/watertrk/adcpcal.out)Look at the figures again:
figview.py --type png
Check editing again
dataviewer.py -e
- Add comments to your processing documentation about
interesting features, problems
final (complete) calibration values used
Now make web plots with quick_web.py
make web plots
quick_web.py --interactive
Or, to use the same sections as were used in the postprocessing demo::
mkdir webpy
cp ../os38nb_postproc/webpy/sectinfo.txt webpy
quick_web.py --redo
View with a browser, look at webpy/index.html::
firefox webpy/index.html
When you’re satisfied, extract the data for other people to use.
matlab
extract data
quick_adcp.py --steps2rerun matfiles --auto
The matlab files created are
vector/vector_uv.mat,vector/vector_xy.mat
contour/contour_uv.mat,contour/contour_xy.mat
contour/allbins_*.mat
The contents of these matlab files and the netCDF file we generate are documented (See here in the CODAS documentation, in the section concerning ways to access ADCP data.
netcdf
For this cruise, to get a NetCDF file contour/os38nb.nc
run this command:
adcp_nc.py adcpdb contour/os38nb km1001c_demo os38nb --ship_name Kilo Moana
To check netcdf file
ncdump -h contour/os38nb.nc
Note
CODAS processing uses zero-based decimal days. See CODAS Conventions
Note
When you are done with all the processing, with permission from the Principal Investigator, we encourage you to submit the data to the Joint Archive for Shipboard ADCP so you get credit for your data collection and processing, and other people can use it too.
Available Demos
adcp_database_maker.py
commandline details